


Программируемый контроллер ВЕРТОР КЛАССИК V2.1

Технические данные и краткое руководство пользователя
1. Назначение устройства
Программируемый контроллер «Вертор Классик» (Рис. 1.1) представляет собой классический ардуиносовместимый контроллер, который может использоваться для выполнения различных учебных проектов в области электроники, автоматики и робототехники.
Рис. 1.1
В рамках стандартных функциональных возможностей контроллер может принимать сигналы от датчиков, обрабатывать их и формировать управляющие сигналы для исполнительных устройств согласно загруженной в него программе. Применение устройства для создания систем управления роботами или мощными исполнительными модулями возможно только при совместном использовании с платами расширения.
Подключение электронных компонентов или модулей в базовом варианте выполняется посредством штырьковых проводов и макетной платы. Однако допускается установка плат расширения в колодки с гнездовыми контактами, с помощью которых возможно подключение модулей системы «Вертор» (или иных модулей) с помощью кабелей.
Контроллер «Вертор Классик» разработан и произведен в рамках образовательного направления «Эвольвектор Умные Контроллеры», входящего в концепцию «Эвольвектор Умный Мир».
2. Конструкция контроллера и назначение выводов (контактов)
Контроллер выполнен в виде печатной платы, которая оснащена набором функциональных элементов, показанных на Рис. 2.1.
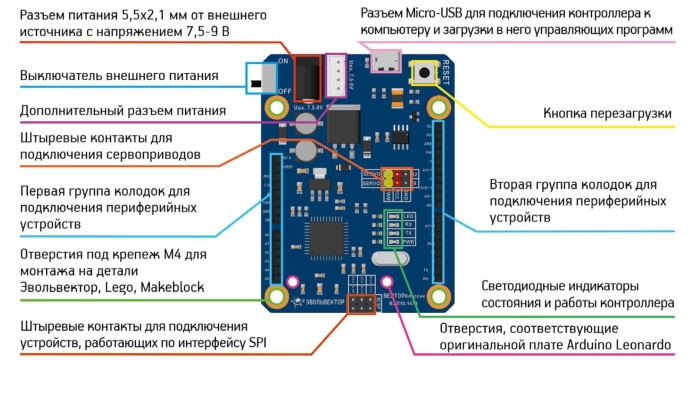
Рис. 2.1
На рисунке 2.2 представлен внешний вид контроллера с указанием габаритных размеров, а также расположение и размеры крепежных отверстий.
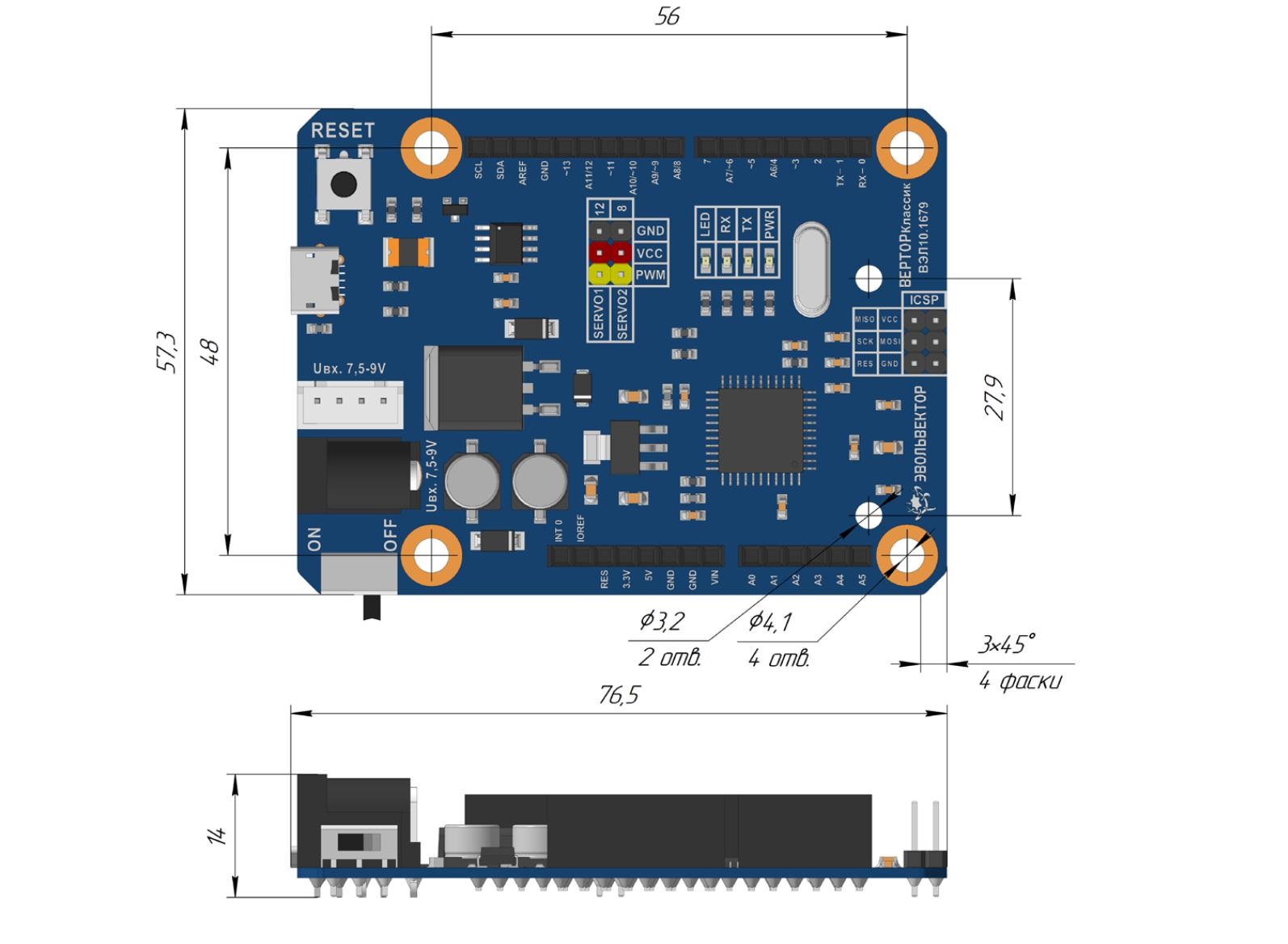
Рис. 2.2
Контроллер «Вертор Классик» оснащен двумя типами крепежных отверстий.
Первый тип предназначен для крепежа М3. Расположение данных крепежных отверстий на плате соответствует расположению крепежных отверстий оригинального контроллера Arduino Leonardo. Два из них выполнены отдельно, а два других совмещены с отверстиями второго типа.
Второй тип — это отверстия под крепеж М4, с помощью которого можно крепить контроллер к деталям конструктора «Эвольвектор», а также к деталям конструкторов Lego и Makeblock
Межосевые расстояния этих отверстий кратны шагу 8 мм, который имеют детали указанных конструкторов.
Все доступные пользователю выводы в колодках делятся на цифровые и аналоговые. Цифровые выводы пронумерованы с 0 до 13, а аналоговые от А0 до А5. При этом все аналоговые выводы могут использоваться в качестве цифровых. Цифровые пины 4, 6, 8, 9, 10, 12 также могут использоваться в качестве аналоговых выводов с номерами соответственно от A6 до A11 в программировании. Цифровые пины, имеющие поддержу ШИМ, отмечены знаком «~». К ним относятся пины «~3», «~5», «~6», «~9», «~10», «~11», «~13».
Помимо этого, присутствуют контакты питание 5V; питание 3.3V; «земля». Также плата оснащена выводами для подключения устройств, обменивающихся данными по протоколу I2C (SCL, SDA); выводом для подачи опорного напряжения (AREF); выводом для сброса контроллера (RES); выводом, на который подается сигнал внешнего прерывания (INT0).
3. Принцип работы с контроллером
Контроллер «Вертор Классик V2.1» построен на платформе Arduino Leonardo и фактически является доработанной версией указанной платы с расширенным функционалом. Как у любого другого контроллера в общем случае принцип его работы сводится к приему сигналов от датчиков, их обработке и формированию управляющих сигналов для исполнительных устройств (индикаторов, двигателей и т.д.) в соответствии с загруженной программой. Датчики и исполнительные устройства подключаются либо с помощью макетной платы, либо посредством плат расширения в зависимости от особенностей конструкции их разъемов.
В качестве датчиков могут выступать любые сенсорные электронные компоненты или электронные модули системы Вертор 2.0, которые выдают аналоговые или цифровые сигналы с рабочим уровнем напряжения 3,3-5 В (подключаются через плату расшириения «Вертор Разъемы»).
Исполнительными устройствами могут быть индикаторы, экраны или электроприводы. При этом рабочий уровень напряжения выходных сигналов на выводах контроллера для управления исполнительными элементами составляет только 5 В. Допускается суммарное токопотребление всех исполнительных устройств (электропиводных и электронных) не более 1,3 А. Для управления периферией с более высоким потребляемым током необходимо обязательно (!!!) использовать вспомогательные модули (драйверы), иначе контроллер может выйти из строя.
Общий порядок работы с контроллером.
А. Соберите устройство по вашему проекту (на рисунке 3.1 в качестве примера такого устройства показан дверной звонок).
Б. Подключите контроллер к компьютеру с помощью кабеля USB (на контроллере используется разъем Micro-USB). Если на ПК установлена операционная система Windows, то убедитесь, что контроллер автоматически распознан системой и для него установились драйвера. В случае, если этого не произошло (данная ситуация может возникнуть в Windows 7 и более ранних версиях) — установите драйвер вручную, скачав его по ссылке с сайта Академии Эвольвектор (academy.evolvector.ru/vertordrivers). В операционных системах Linux установка драйвера не требуется.
В. Создайте и загрузите в контроллер программу, которая отражает алгоритм обработки входных сигналов и порядок генерирования выходных для работы собранного устройства (Рис. 3.3). Указанная программа может быть создана в графической среде программирования «Студия Эвольвектор», после чего она автоматически переводится в программный код и загружается в контроллер через программное обеспечение Arduino IDE. Либо же программный код может быть сразу написан в Arduino IDE.
Г. Отключите контроллер от ПК, подключите питание и проверьте устройство в работе. Если оно не работает или работает не корректно, то произведите доработку конструкции или программы. Более подробно о подключении к контроллеру других электронных модулей или компонентов, о примерах проектов, и особенностях использования контроллера в них можно узнать из образовательных курсов к конструкторам «Эвольвектор» из серии «Умный мир».
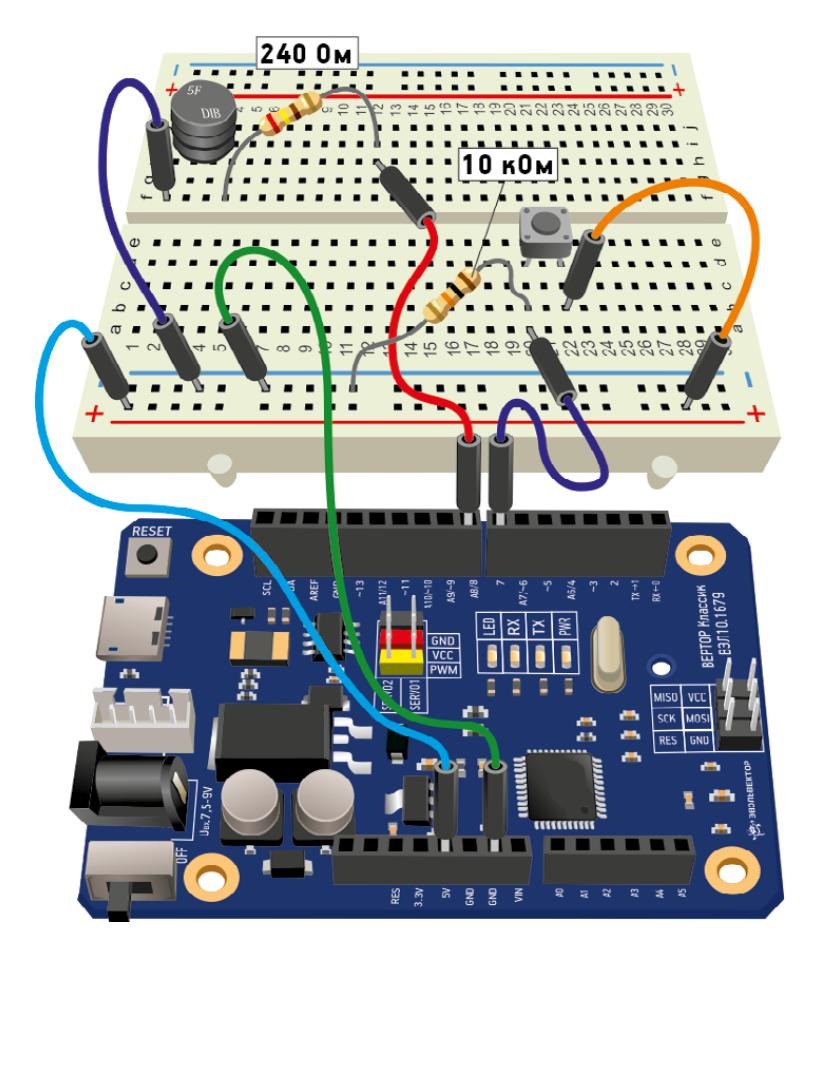
Рис. 3.1
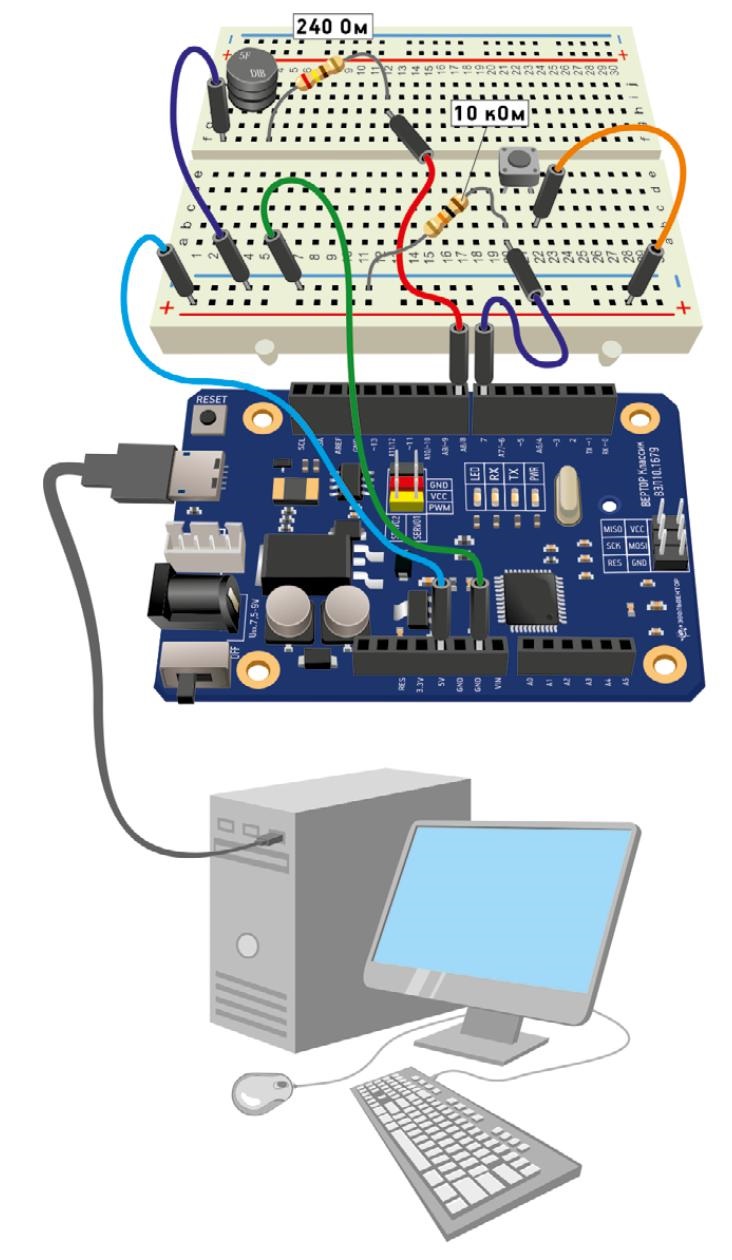
Рис. 3.2
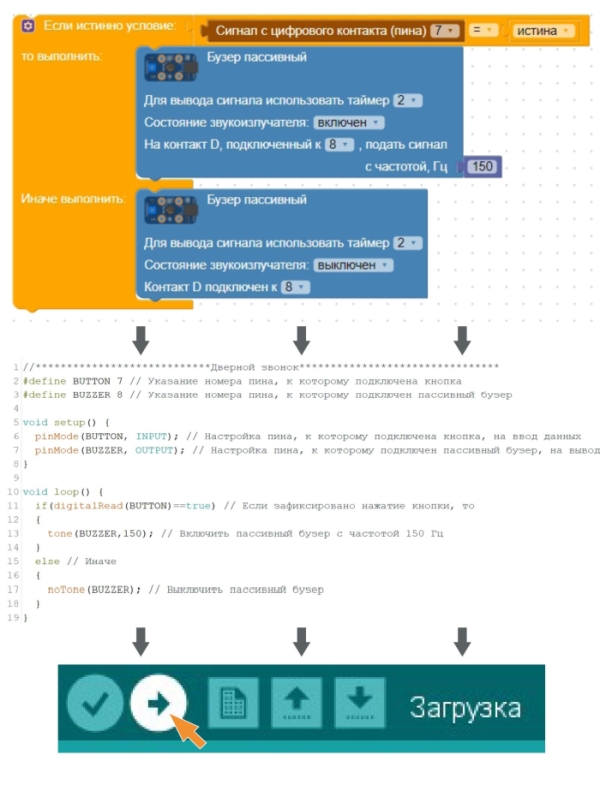
Рис. 3.3
4. Технические характеристики
| Наименование характеристики | Значение |
| Размеры контроллера | 57х76 мм |
| Количество цифровых контактов | 20 шт. |
| В составе цифровых контактов наличие выводов с поддержкой ШИМ | 7 шт. |
| Количество аналоговых выводов | 12 шт. |
| Максимальное количество подключаемых серводвигателей (с суммарной нагрузкой не более 1 А) | 2 шт. |
| Размеры разъема питания | 5,5х2,1 мм |
| Тип USB разъема | Тип В |
| Наличие выключателя питания | Да |
| Допустимый диапазон входного напряжения питания | 7,5...9 В |
| Номинальное рабочее напряжение микроконтроллера | 5 В |
| Максимальный суммарный ток потребления устройств, подключенных к контроллеру | Не более 1,3 А |
| Тактовая частота микроконтроллера | 16 МГц |
| Оперативная память | 2 Кб |
| Встроенная Флеш-память | 32 Кб (Atmega32u4), из которых 4 Кб используются для загрузчика |
| Программное обеспечение для программирования контроллера | «Студия Эвольвектор», Arduino IDE |
5. Условия гарантии
ООО «Эвольвектор» гарантирует работоспособность контроллера на протяжении 12 месяцев с момента приобретения устройства, при условии, что плата в течение указанного срока не получала механических повреждений и не выведена из строя в результате ошибочных действий пользователя.
По вопросам гарантийного обслуживания, а также по всем техническим и информационным вопросам можно обращаться на электронную почту info@evolvector.ru, help@evolvector.ru, а также по телефону +7 (499) 391-01-05. Адрес для корреспонденции: 143300, Московская область, г. Наро-Фоминск, ул. Московская, д.15.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: