


Плата расширения «Привод Классик 2.0 V1.1»

Технические данные и краткое руководство пользователя
1. Назначение устройства
Плата расширения «Привод Классик 2.0» (Рис. 1.1) предназначена для использования в школьной и кружковой проектной деятельности при создании различных электронных устройств в области автоматики и робототехники. При ее установке на классические контроллеры Arduino, а также контроллеры «Вертор Классик», «Вертор Базис» и «Вертор JS» она обеспечивает возможность подключения к ним моторов и сервоприводов с относительно высоким токопотреблением.
Функционал платы предусматривает подключение с управлением от контроллера до трех моторов с суммарным током потребления до 3 А и до трех сервоприводов с общим током потребления также до 3 А. Это позволяет реализовать такие учебные проекты, как мобильные роботы, учебные производственные линии (конвейеры), автоматические устройства системы «Умный дом» и подобные им.
Помимо этого, благодаря наличию на плате колодок, сохраняется возможность подключения электронных компонентов или модулей посредством штырьковых проводов и макетной платы.
Плата расширения разработана и произведена в рамках образовательного направления «Эвольвектор Умные Контроллеры», входящего в концепцию «Эвольвектор Умный Мир».
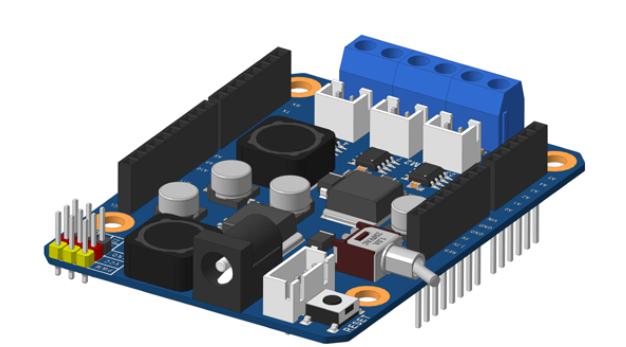
Рис.1.1
2. Конструкция и назначение выводов (контактов)
Расширение «Привод Классик 2.0» выполнено в виде печатной платы, которая оснащена набором функциональных элементов, показанных на рисунке 2.1.
- Две группы колодок с гнездовыми контактами для подключения компонентов в процессе сборки устройств с помощью макетной платы;
- Кнопка принудительной перезагрузки подключенного контроллера;
- Разъем питания 5,5х2,1 мм от внешнего источника с напряжением 7,5-9 В;
- Разъем питания от универсального аккумуляторного модуля питания Вертор 2.0;
- Тумблер выключения внешнего питания;
- Индикатор включения подачи внешнего питания;
- Штыревые контакты для подключения трех сервоприводов с общей нагрузкой до 3 А;
- Разъемы М1, М2, М3 для подключения моторов с общей нагрузкой до 3 А;
- Клеммники М1, М2, М3 для альтернативного подключения моторов с общей нагрузкой до 3 А;
- Индикаторы направления вращения моторов М1, М2, М3;
- Отверстия под крепеж М4 для монтажа на детали Эвольвектор, Lego, MakeBlock;
- Крепежные отверстия, совместимые с оригинальной платой Arduino Leonardo.

Рис.2.1
На рисунках 2.2а и 2.2б указаны габаритные размеры, а также расположение и размеры крепежных отверстий как стандартных (соответствующих оригинальной плате Arduino Leonardo), так и для крепления к деталям конструктора «Эвольвектор», Lego и Makeblock с межосевым расстоянием, кратным 8 мм.

Рис.2.2 а
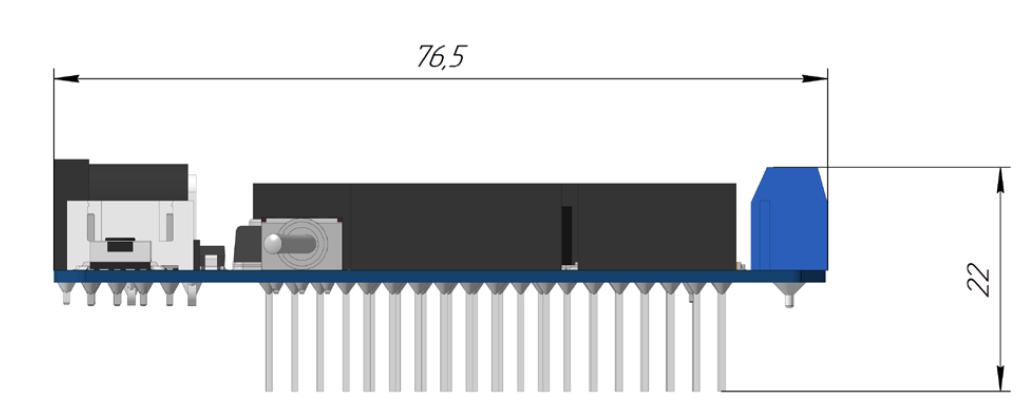
Рис.2.2 б
3. Принцип работы
Плата расширения устанавливается на контроллер путем помещения ее штырей в гнезда колодок контроллера. Для надежного крепления можно использовать винты с втулками в качестве проставок или стойки. После установки линии разъемов управления приводами оказываются соединенными с определенными контактами контроллера. С какими именно – показано на рисунке 3.1 для контроллеров «Вертор Классик V2.1» и «Вертор Базис V2.1.4», и на рисунке 3.2 при использования платы расширения совместно с контроллером «Вертор JS». На указанных рисунках приведены обозначения управляющих разъемами приводов контактов, которые используются при составлении программ для контроллеров.

Рис.3.1

Рис.3.2
Далее к соответствующим разъемам платы подключаются коннекторы кабелей электроприводов. Управление ими осуществляется через выполнение программы, загруженной в контроллер. Причем управление серводвигателями идет напрямую от контактов контроллера, а управление моторами выполняется через одноканальные драйверы моторов, каждый из которых может выдавать ток до 1А.
Питание подключаемых приводов в процессе их работы осуществляется от двух смонтированных на плату DC-DC преобразователей, которые настроены на выходное напряжение 6 вольт. Отдельный преобразователь с током до 3А питает серводвигатели. И такой же отдельно запитывает драйверы обычных коллекторных моторов. При этом, внешнее питание необходимо подавать только на плату расширения «Привод Классик 2.0», а контроллер, с которым она соединена, через контакты колодок питается от платы расширения.
Важно отметить, что концепция системы модульной электроники «ВЕРТОР 2.0» предусматривает одновременное использование плат расширения «Привод Классик 2.0» и «Разъемы ВЕРТОР 2.0». Установив на контроллер первую плату, а на нее вторую, можно получить возможность одновременного управления как приводами, так и модулями датчиков либо индикаторов. Поэтому у платы расширения «Привод Классик 2.0» для управления электродвигателями и сервоприводами используются другие сигнальные контакты контроллера, нежели для подключения электронных модулей «Разъемы ВЕРТОР 2.0» (управляющие линии разъемов и приводов не пересекаются!). Данная возможность одновременного использования двух плат востребована при выполнении проектов по автоматике или робототехнике.
4. Выполнение проектов с использованием платы расширения
Компания «Эвольвектор» рекомендует выполнять образовательные проекты на основе своих электронных модулей (с использованием платы расширения в частности) в соответствии с методикой ТРИЗ (Теория Решения Изобретательских Задач). Она заключается в том, что каждый проект реализуется последовательно в несколько четко очерченных этапов.
4.1 Определение и описание практической задачи.
Для того, чтобы собрать устройство с использованием платы расширения, необходимо понимать для решения какой задачи осуществляется ее сборка и как оно будет функционировать. Плата расширения «Привод Классик 2.0» предназначена для управления приводами, поэтому она подходит для решения задач, связанных с приведением в движение различных механизмов, либо с перемещением предметов в пространстве.
4.2 Проектирование конструкции устройства для решения поставленной задачи.
Плата расширения применяется только совместно с контроллерами и расширяет их функциональные возможности. Поэтому требуется выбрать контроллер, наиболее подходящий для решения задачи. Помимо этого необходимо выбрать моторы и сервоприводы, которые, подходят для создания будущего устройства.
4.3 Составление алгоритма работы устройства
Для последующего программирования и настройки устройства необходим план действий, которые будет выполнять устройство в целях решения поставленной задачи. Здесь должны быть определены разъемы платы расширения, к которым будут подключаться приводы, характер и свойства сигналов, которые будут задавать динамические и скоростные режимы работы приводов.
Направление движения вала моторов задается полярностью питания, поданного на контакты разъемов, к которым они подключены. А управление скоростью вращения электродвигателей обычно выполняется с помощью широтно-импульсной модуляции сигналов (сокращенно ШИМ).
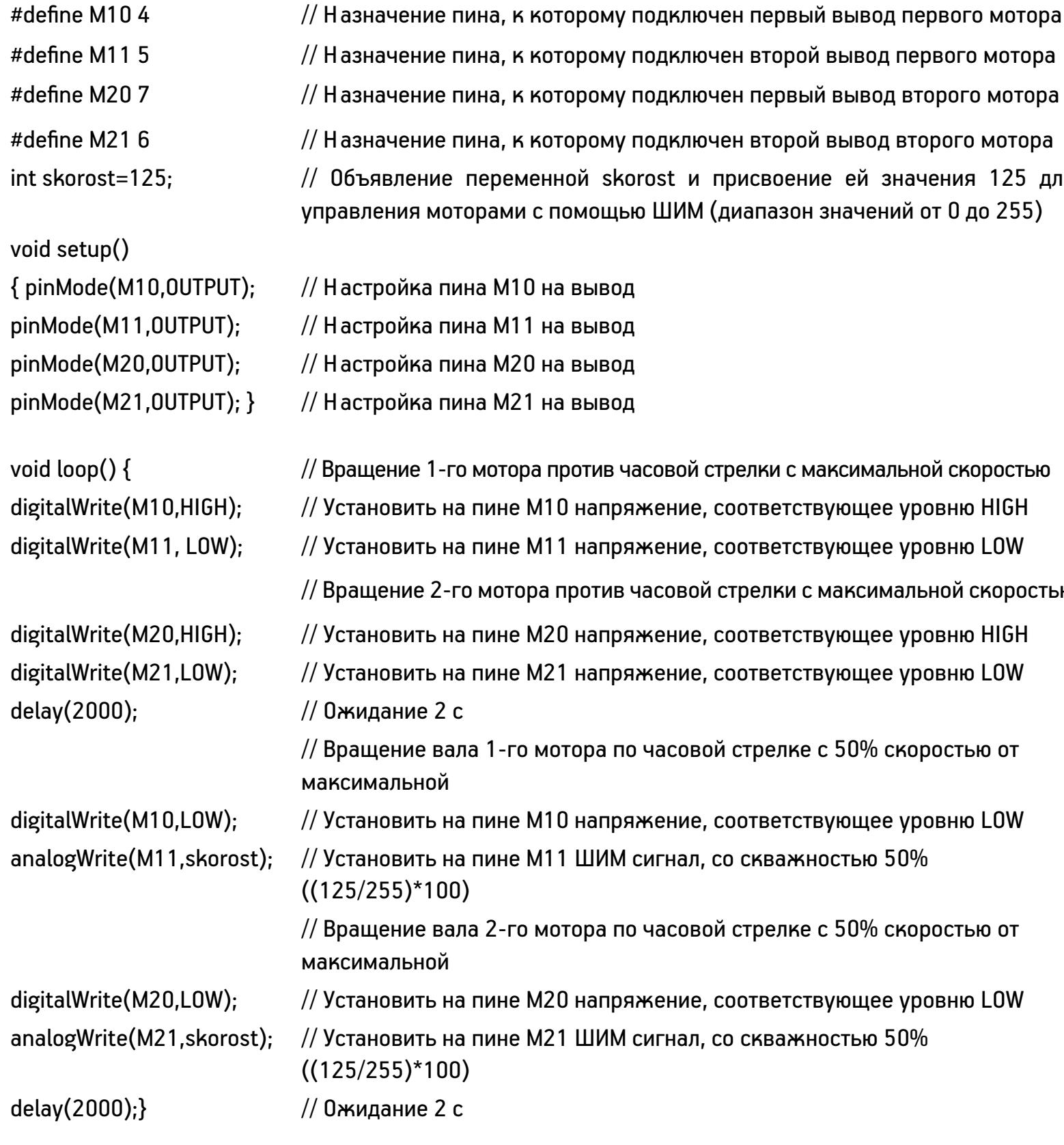
В качестве иллюстрирующего примера на рисунке 4.1 показано поведение мотор-редуктора, подключенного к разъему М1, контактами которого управляют линии контроллера 4 и 5. В зависимости от сигналов, подаваемых на эти линии, мотор вращается в одну или другую сторону с той или иной скоростью, исходя из параметров ШИМ.

Рис.4.1
4.4 Сборка устройства
После определения конструкции и формирования алгоритма работы устройства его необходимо собрать. В рамках сборки плата расширения устанавливается на контроллер с помещением штырей платы в гнезда контроллера. Благодаря нессиметричному расположению штырей неверная установка платы на контроллер исключена. Исходя из спроектированной конструкции контроллер с платой и подключаемые приводы могут быть закреплены на вспомогательных деталях или механизмах.
После чего необходимо выполнить подключение приводов в соответствии с алгоритмом. Моторы и серводвигатели из конструкторов «Эвольвектор» оснащены штекерами для удобства подключения и исключения ошибок. Поэтому их просто надо поместить в соотвествующие разъемы на плате расширения (пример на рисунке 4.2).

Рис.4.2
4.5 Программирование устройства
На данном этапе необходимо написать программу в соответствии с ранее сформированным алгоритмом, чтобы приводы работали в требуемых режимах. При этом, обращение к линиям разъемов платы расширения в программе должно выполняться с учетом обозначений подключенных к ним контактов контроллера, которые показаны на рисунке 3.1 и рисунке 3.2.
Средство создания программы целиком определяется контроллером, совместно с которым применяется плата расширения. Для «Вертора Классик» и «Вертора Базис» это может быть Arduino IDE. Для «Вертора JS» такой средой выступает Espruino IDE. Помимо этого все перечисленные контроллеры также могут программироваться в блочно-графической среде «Студия Эвольвектор», которую можно скачать из раздела «Скачать» на сайте «Академии Эвольвектор».
Особенностью платы расширения является то, что для управления моторами не требуется специализированной библиотеки. Управление двигателями выполняется с помощью стандартных команд. Ниже приведен пример скетча для Arduino IDE с простым алгоритмом: два мотора вращаются две секунды в одну сторону с максимальной скоростью, а потом две секунды в другую сторону со скоростью 50% от максимальной.
Управление сервоприводами в случае использования контроллеров «Вертор Классик» или «Вертор Базис» и программирование их в среде Arduino IDE выполняется c помощью стандартной библиотеки «Servo.h». При использовании контроллера «Вертор JS» и среды Espruino IDE используется библиотека «servo.js». А в «Студии Эвольвектор» необходимая библиотека встроена и используются только блоки управления серводвигателями.
4.6 Проверка выполнения задачи устройством и доработка при необходимости
Завершающим этапом работы над устройством является тестирование его работы и выявление недостатков или ошибок с последующим их устранением.
Дополнительную информацию о принципах работы с платой расширения и примеры проектов, сделанных на ее основе по методике ТРИЗ, Вы можете найти в учебных пособиях к конструкторам «Эвольвектор» или на сайте академии «Эвольвектор».
5. Технические характеристики
| Наименование характеристики | Значение |
| Габаритные размеры платы | 57х76 мм |
| Максимальное количество подключаемых моторов | 3 |
| Максимальное количество подключаемых сервоприводов | 3 |
| Размеры разъема питания | 5,5х2,1 мм |
| Наличие разъема питания от аккумуляторного модуля | Да |
| Наличие выключателя питания с индикатором | Да |
| Наличие индикаторов направления вращения валов моторов | Да |
| Наличие кнопки принудительной перезагрузки контроллера | Да |
| Номинальное напряжение питания приводов | 6 В |
| Максимальный суммарный ток моторов (по 1 А на канал) | 3 А |
| Максимальный суммарный ток сервоприводов | 3 А |
6. Условия гарантии
ООО «Эвольвектор» гарантирует работоспособность контроллера на протяжении 12 месяцев с момента приобретения устройства, при условии, что плата в течение указанного срока не получала механических повреждений и не испорчена в результате ошибочных действий пользователя.
По вопросам гарантийного обслуживания можно обращаться на электронную почту info@evolvector.ru, help@evolvector.ru, а также по телефону +7 (499) 391-01-05. Адрес для корреспонденции: 143300, Московская область, г. Наро-Фоминск, ул. Московская, д.15.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: