


Проект №7 «Быстрее, дальше, сильнее»

В процессе работы робот перемещается сам или перемещает предметы (грузы). Он это может делать с разной скоростью: медленно или быстро. Где-то надо побыстрей, а где-то важно наоборот выполнять движения медленно. Для этого применяется регулировка скорости вращения двигателей.
Однако при выполнении работы возникает еще один важный вопрос. Как будет меняться скорость движения робота в зависимости от нагрузки, которую ему приходится нести? Ведь мы из практики знаем, что если человек берет в руки что-то легкое, то он может перенести это быстро и далеко. А если груз тяжелый, то с ним получается все медленнее и переместить его получается только на близкое расстояние. Соответственно, можно предположить, что у роботов дела с этим складываются похожим образом.
Для того, чтобы не забывать про данное обстоятельство и учитывать его при конструировании разных моделей роботов, очень полезно провести практическое исследование влияния нагрузок при разных режимах движения робота.



Конструкция
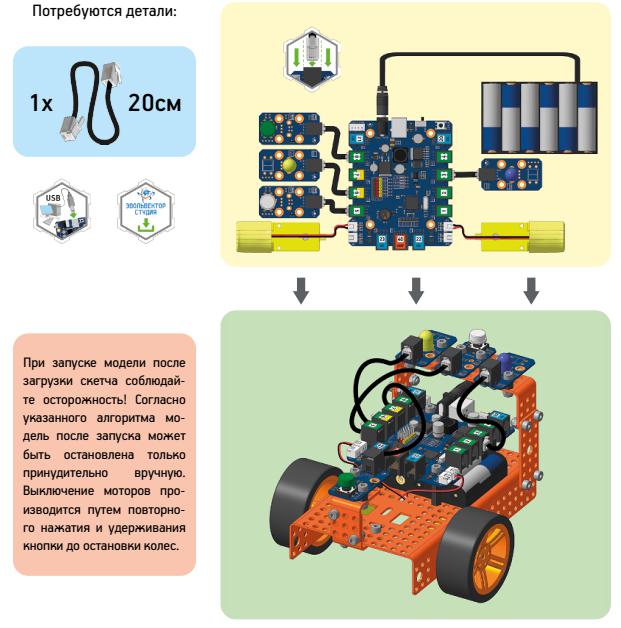
Исследование будет подразумевать несколько разных режимов работы робота. Эти режимы надо будет выбирать. Поэтому установим на работе для этого еще одну кнопку. В остальном конструкция останется прежней.
Алгоритм
Каждый привод описывается несколькими параметрами. К ним относятся скорость вращения вала (частота вращения), напряжение питания и крутящий момент, который показывает какое вращающее усилие развивает привод. Эти параметры взаимозависимы. Количественные зависимости параметров друг от друга называются характеристиками.
В комиксе проекта «Голодный Робокарлсон» приводился график зависимости частоты вращения электродвигателя от напряжения на нем. Такая характеристика называется регулировочной. То есть она отражает характер изменения частоты вращения вала мотор-редуктора от изменения напряжения питания, что и представляет собой регулирование скорости.
В то же время есть характеристика, которая отражает зависимость частоты вращения вала привода от механической нагрузки на вал при постоянном напряжении. Такая характеристика называется механической.
Если ее построить для разных значений напряжения, то для мотор-редукторов, приводящих в движение колеса шасси, она будет иметь примерный вид, показанный на рисунке ниже.
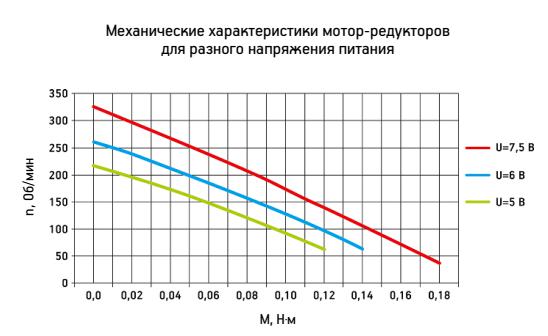
На графике хорошо видно, что при увеличении нагрузки на вал в виде противодействующего крутящего момента уменьшается скорость его вращения. То есть чем сильнее нагрузить робота, тем медленнее он будет двигаться или перемещать предметы. Тем не менее при любой нагрузке можно продолжать менять относительную скорость вращения вала с помощью регулирования напряжения.
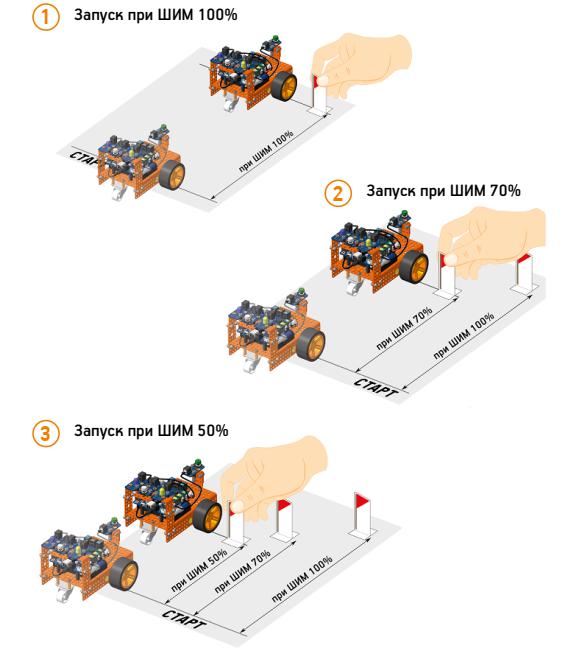
По сути, в данном проекте предстоит проверить приведенную характеристику на практике. Для этого предусмотрим три режима работы робота с разным напряжением, подаваемым на моторы. Режимам соответствуют уровни в 50%, 70% и 100% от максимального напряжения, которые будут задаваться с помощью ШИМ. В каждом режиме робот будет ехать 3,5 секунды, после чего автоматически остановится. Выбор режимов будет осуществляться одной кнопкой, а запуск робота в этом режиме — другой кнопкой.
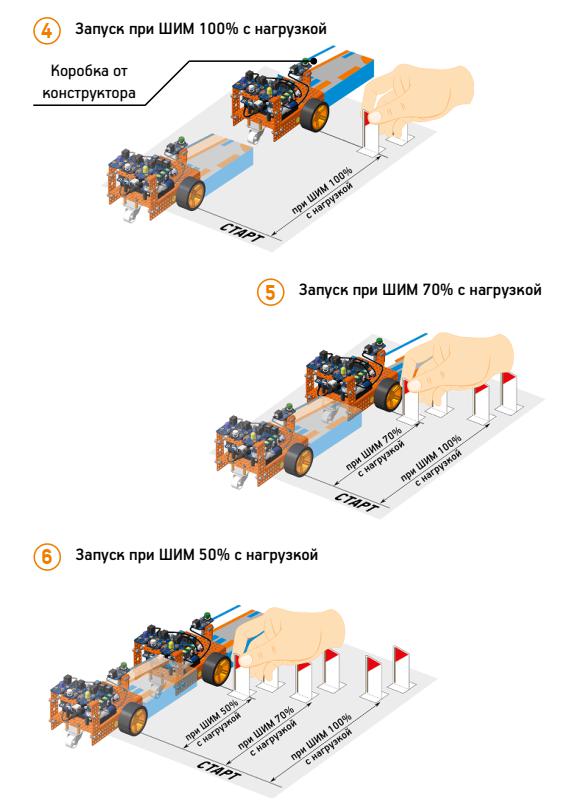
Дальше запустим робота в каждом режиме без нагрузки и с нагрузкой, которую будет имитировать коробка (робот будет ее тащить по поверхности, по которой будет ехать). По результатам отметим расстояния, на которые робот будет уезжать. Эти расстояния можно отметить флажками. И оценим подтверждение механической характеристики на практике.
Сборка
Целью проекта является практическое исследование механической характеристики мотор-редукторов, приводящих в движение шасси, и ее влияние на поведение робота.
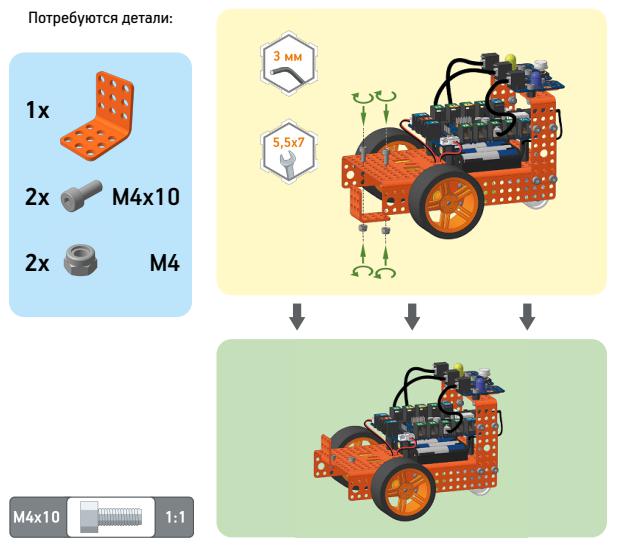
1. Монтаж держателя кнопки на корпус шасси
2. Установка кнопки на шасси
2.1 Подготовка модуля к установке в виде крепления вспомогательных деталей
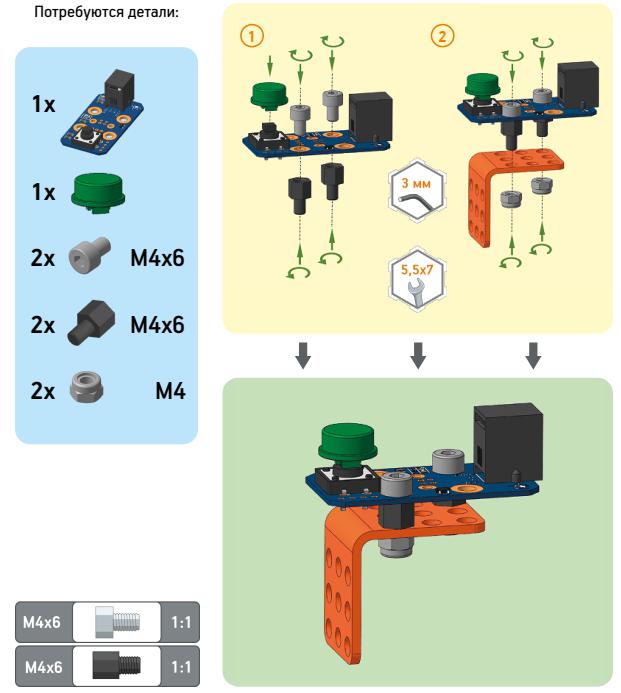
2.2 Крепление кнопки к шасси
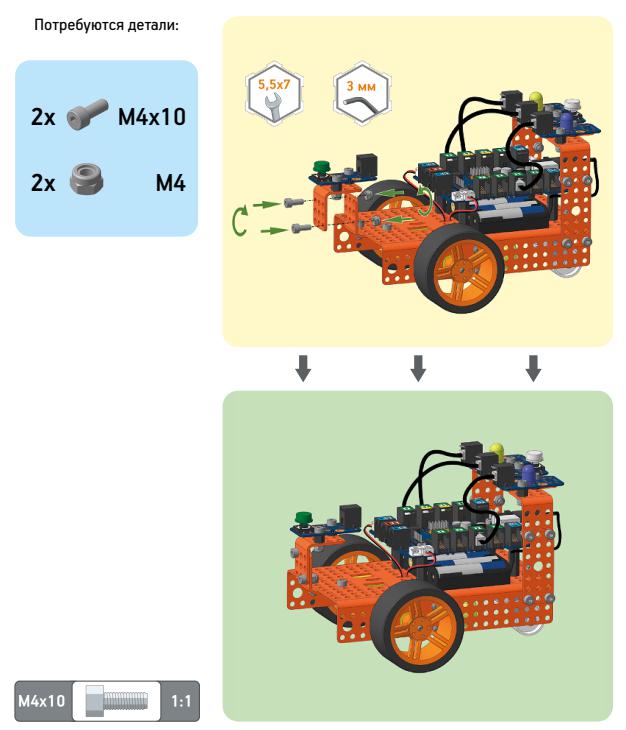
3. Подключение модулей, моторов, питания к контроллеру и загрузка в него программы
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
Подключите к контроллеру питание от батарейного отсека и выполните эксперименты в соответствии с приведенными ниже иллюстрациями. Обратите внимание на то, что поведение робота принципиально соответствует механической характеристике моторов.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: