


Проект №6 «Слалом»

По итогу первых пяти проектов вы попрактиковались в соединении деталей между собой, созданию подвижных соединений в виде шарниров и в управлении различными типами приводов с помощью контроллера.
Однако нашей стратегической целью является создание роботов, которые будут выполнять работу вместо человека. А физическая работа, совершаемая человеком, - это, прежде всего, работа, связанная с перемещением или преобразованием каких-то предметов. К работе может относиться и перемещение самого человека для того, чтобы что-то посмотреть, найти или сообщить важную информацию другому человеку. Ключевой особенностью является именно перемещение самого работника либо других предметов.
Соответственно, и работа робота будет сводиться к перемещению. Роботы, способные перемещаться, называются мобильными роботами. Те, которые могут совершать операции с предметами, являются манипуляционными. А те, что могут и сами перемещаться и совершать манипуляционные действия, называются мобильно-манипуляционными.
Манипуляционные машины имеют самое сложное устройство. У них в сочленение звеньев необходимо встраивать многочисленные приводы и очень сложно потом всем этим управлять с учетом действующих сил и требуемых параметров скорости или ускорения.
Вот, например, возьмем модель робота в виде робокарлсона. Как видите, он пока что не способен ничего перемещать или перемещаться сам. И, если задаться целью добиться того, чтобы он таки начал двигать другие предметы или двигаться сам, то придется встроить ему в каждую руку и ногу по несколько (как минимум 3) сервоприводов. Итого потребуется более 12 сервоприводов, которые потянут за собой целую цепочку проблем. Это большой вес, большое энергопотребление и необходимость в большом запасе энергии, что опять же большой вес. Плюс к этому очень сложный алгоритм управления такой системой в связи с большим количеством исполнительных устройств и необходимостью удерживать равновесия. В общем получается сложно, громоздко, тяжело и, как результат, очень дорого. Одним словом, делать робота с андроидной концепцией — это совершенно нецелесообразно.
Гораздо оптимальней придерживаться более простых и технологичных конструкций, которые будут решать те же задачи, связанные с собственным перемещением или перемещением каких-либо объектов.
Например, мобильных роботов вполне можно сделать колесными или гусеничными, которые будут гораздо проще, чем шагающие. Но в то же время они будут справляться с перемещением в пространстве лучше, чем шагающие машины. Ведь автомобили на колесах ездят быстрее и перевозят больше, чем лошади или люди на себе. Вот и у роботов то же самое.
Для сборки мобильного робота в базовом варианте нужна всего лишь пара моторчиков с колесами, общий корпус, опорное поворотное колесо и контроллер, чтобы всем этим управлять. Такая базовая конструкция обычно называется колесным шасси. С азов управления им и начнем изучение основ конструирования мобильных роботов.


Конструкция
С данного проекта начинается работа с принципиально иной концепцией. Мы от андроидной конструкции переходим к моделям, основанным на мобильном колесном шасси. Поэтому нам придется полностью разобрать нашего чертовски симпатичного и любимого Робокарлсона. После чего вданном проекте необходимо собрать колесное шасси. У него к п-образному корпусу будут прикреплены два колеса, приводимые в движение мотор-редукторами, и одно поворотное колесо, обеспечивающее устойчивость шасси. Также еще предусмотрим стойку, на которой разместим тактовую кнопку для запуска алгоритмов работы робота и пару индикаторов для информации о текущих режимах работы.
Ну и для того, чтобы сильно не усложнять проект, на этом можно остановиться. Просто установим на это шасси контроллер и источник питания, чтобы научиться им управлять.
Алгоритм
Самое простое, что можно сделать с собранным шасси, - это устроить слалом. Слаломом называется дисциплина в горных лыжах, в которой лыжники спускаются с горы и попутно объезжают флажки, двигаясь при этом зигзагами.
Вот и мы предусмотрим алгоритм, в рамках которого мобильный робот будет выписывать зигзаги и объезжать флажки.
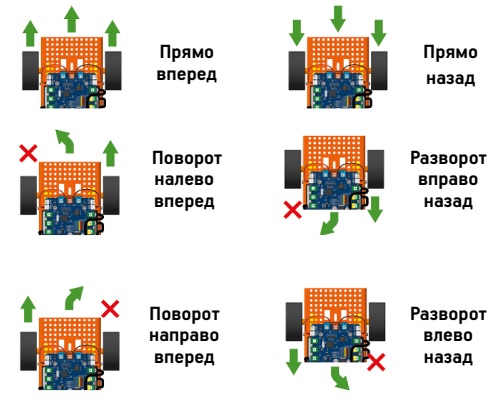
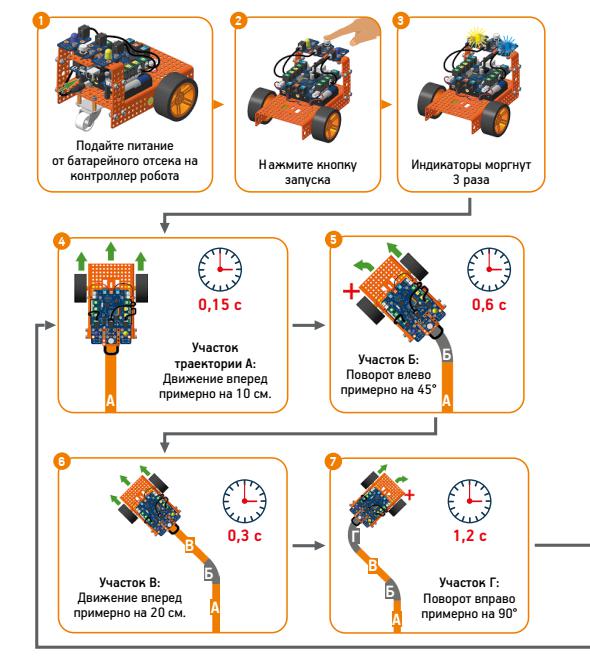
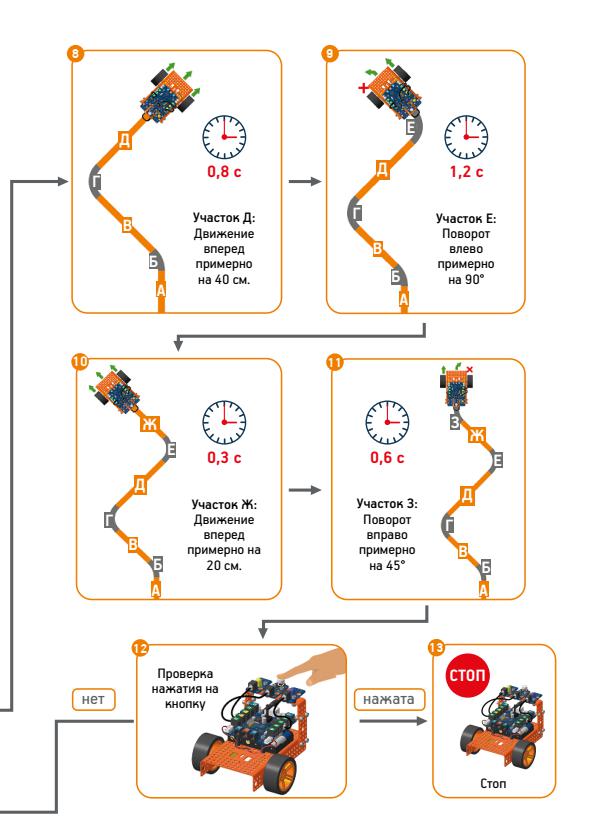
Режим движения шасси с двумя ведущими колесами задается путем отдельного управления каждым двигателем. Для того, чтобы робот ехал прямо, необходимо оба мотора включить в прямом направлении. При необходимости повернуть налево надо левый мотор остановить, а правый включить в прямом направлении. Аналогично при повороте направо уже правый мотор выключается, а левый вращается прямо. Надо двигаться назад — значит оба мотора следует вращать в обратном направлении.
Поскольку моторы пока не оснащены никакими датчиками, то углы поворотов и протяженность прямолинейного движения задается приблизительно через время, на которое включаются моторы. Моторы вращаются с определенной скоростью и, если включать их на разное вермя, то, соответственно, они будут успевать поворачиваться на разные углы и совершать разное количество поворотов. А отсюда будет и разное расстояние, проходимое роботом. Еще не стоит забывать, что включать моторы можно с разными скоростями. Регулирование скорости вращение двигателей мы рассматривали в проекте «Голодный Робокарлсон».
Теперь более подробно поговорим про то, каким будет общий алгоритм в данном проекте. Кнопка управления выполняет функцию запуска алгоритма и его остановки. Поэтому вначале опрашивается кнопка. Если кнопка нажата, то робот мигает двумя светодиодами три раза. После завершения мигания робот выполняет движение по одному зигзагу, то есть отклоняясь вначале влево, потом вправо и возвращаясь обратно. Для того, чтобы было интересней, можно установить флажки, предварительно вырезав их из шаблона для вырезания и склеив.
После выполнения зигзага выполняется опрос кнопки запуска. И если она не нажата, то робот уходит еще на один зигзаг. Так будет постоянно, пока кнопка не окажется нажатой. Если ее нажать, то робот остановится.
Сборка
Целями проекта являются получение навыков сборки колесных шасси и изучение принципов управления классическим шасси с двумя ведущими колесами и одним поворотным.
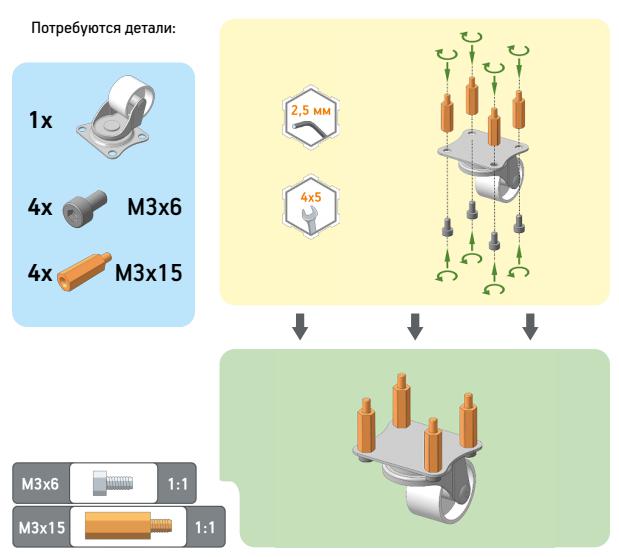
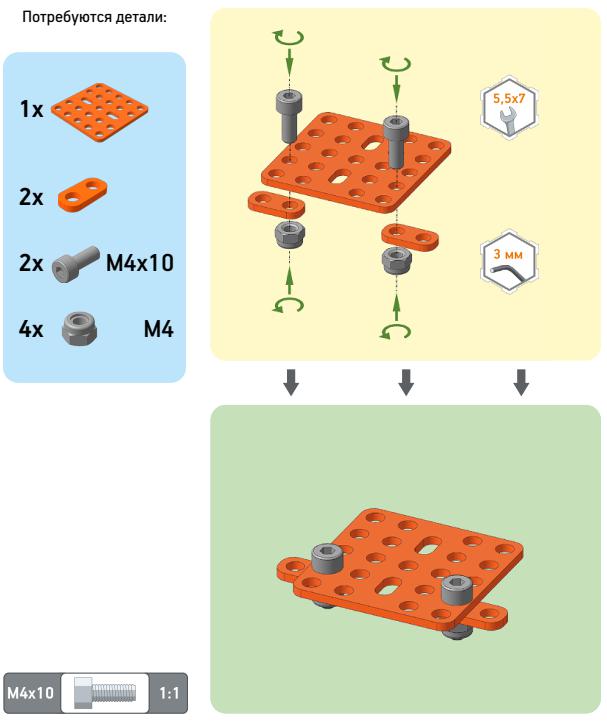
1. Монтаж поворотного колеса
1.1Крепление соединительных стоек к колесу
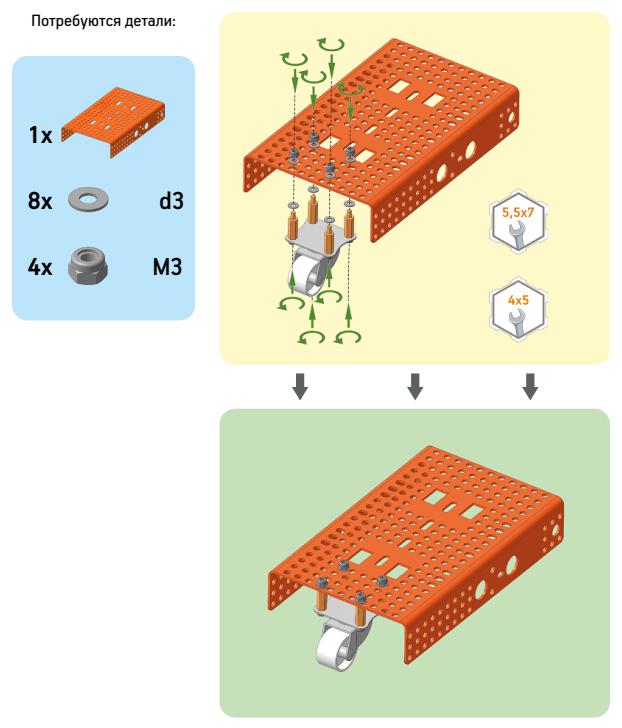
1.2 Установка колеса на раму
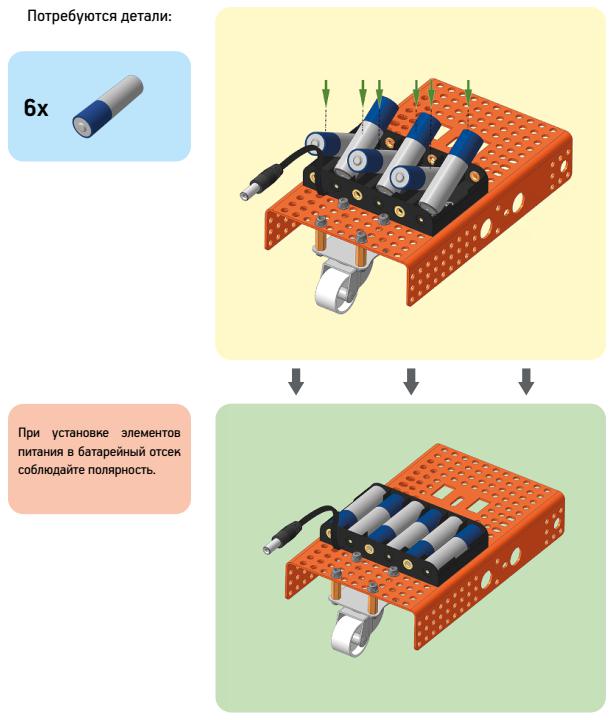
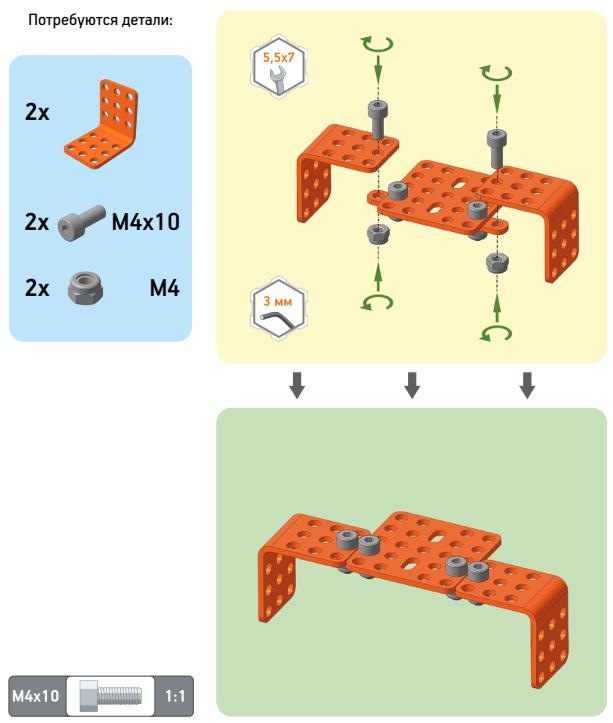
2. Крепление батарейного отсека к раме
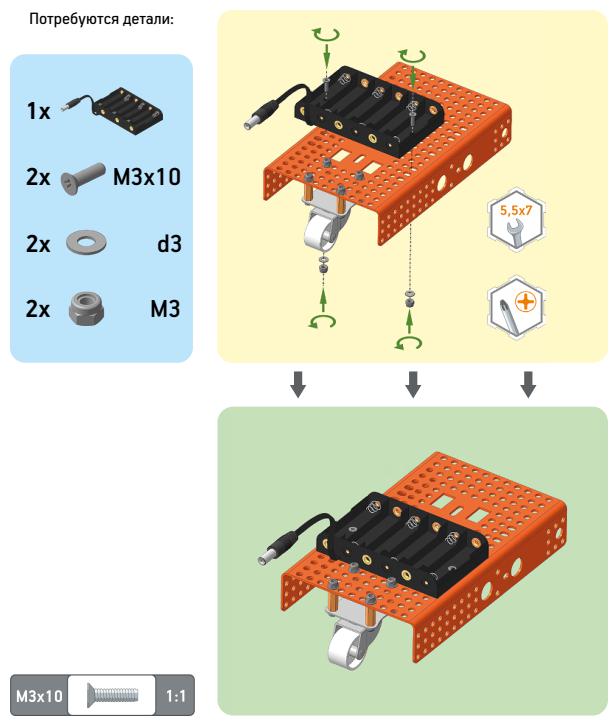
3. Установка элементов питания в батарейный отсек
4. Монтаж контроллера на раму
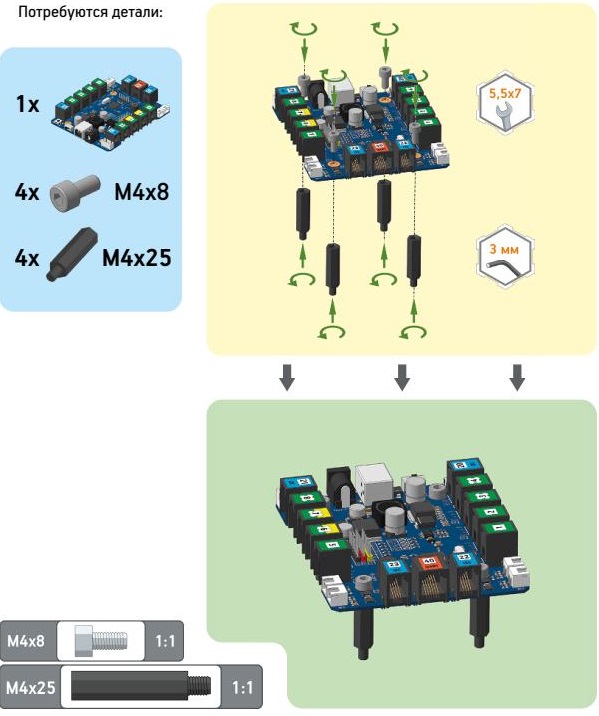
4.1 Крепление соединительных стоек к контроллеру
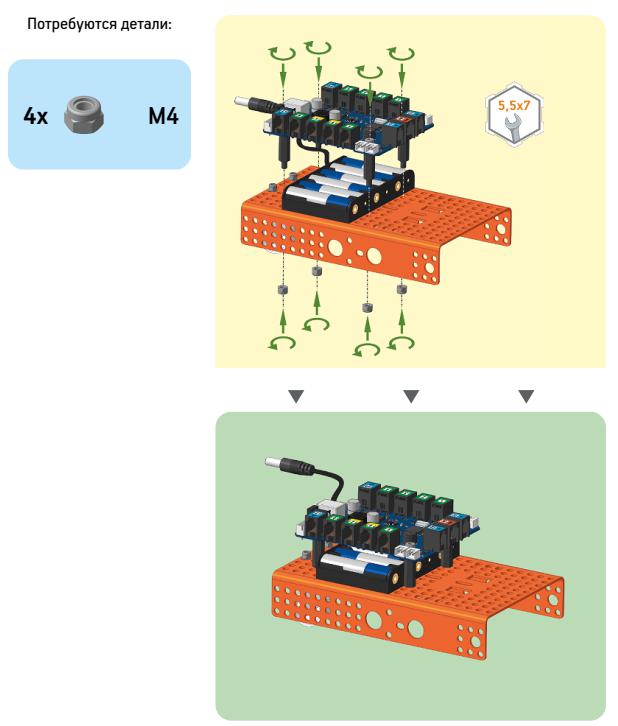
4.2 Крепление контроллера к раме
5. Крепление батарейного отсека к раме
6. Монтаж контроллера на раму
6.1 Крепление соединительных стоек к контроллеру
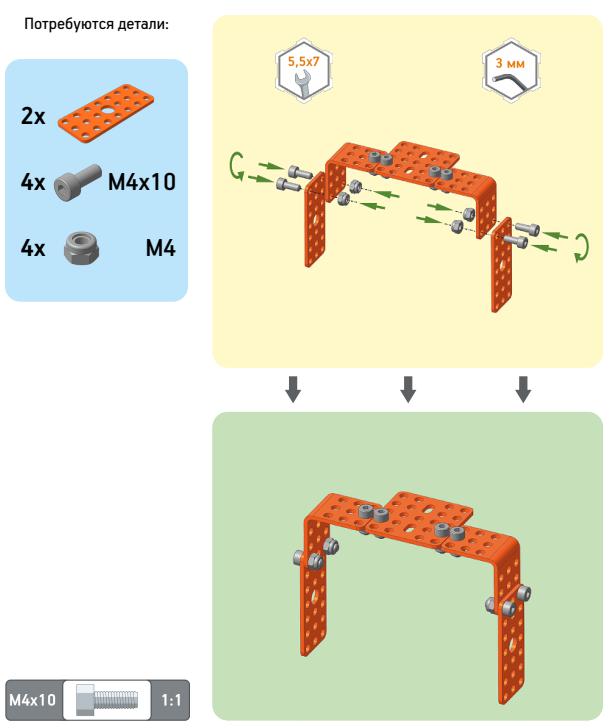
6.2 Досборка верхней перекладины
6.3 Досборка верхней перекладины
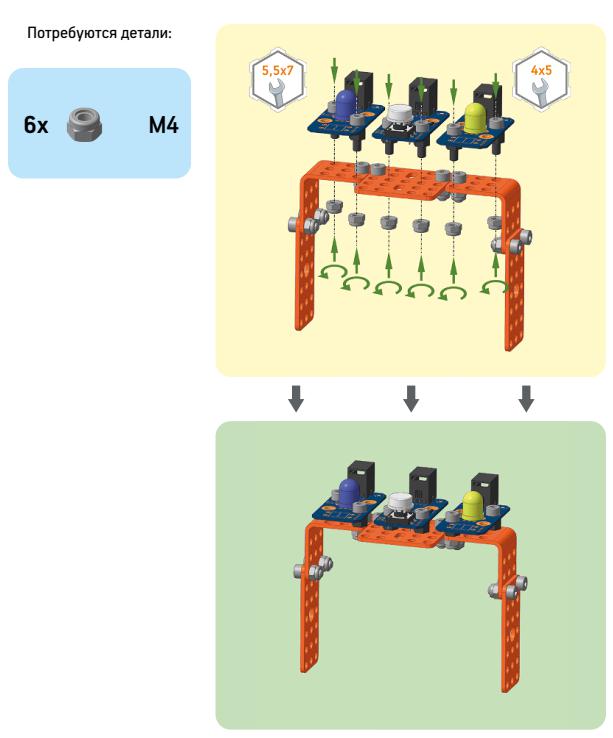
6.4 Подготовка электронных модулей к установке на основание (крепление стоек)
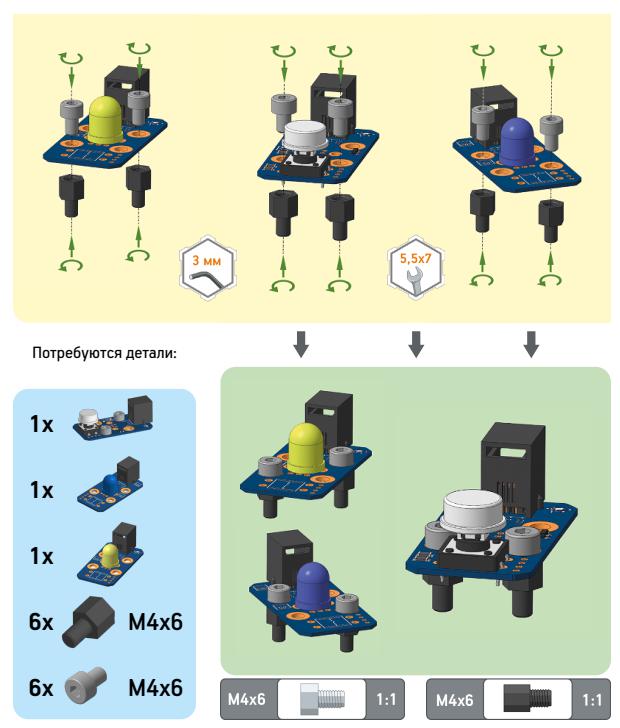
6.5 Установка модулей
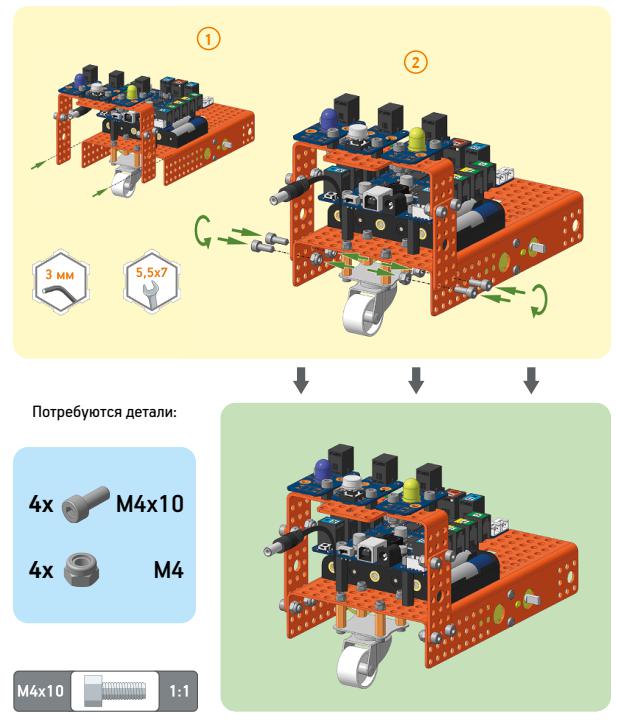
7. Крепление собранной конструкции к раме
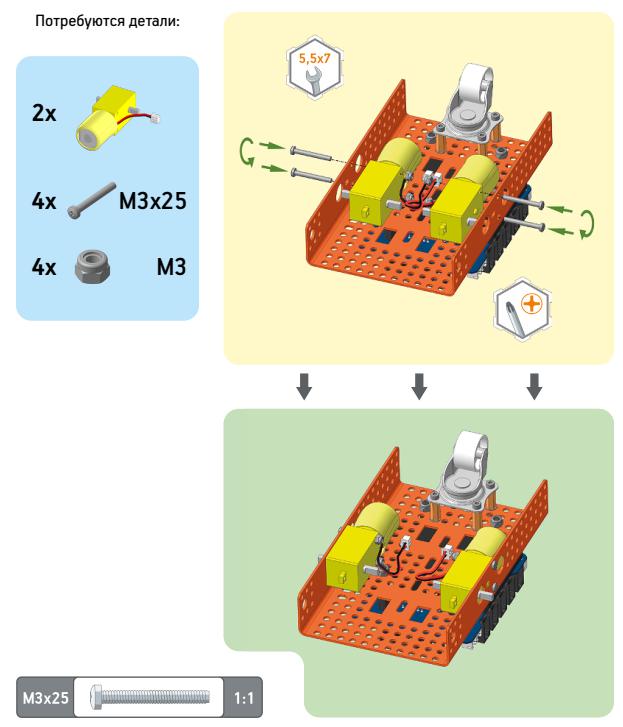
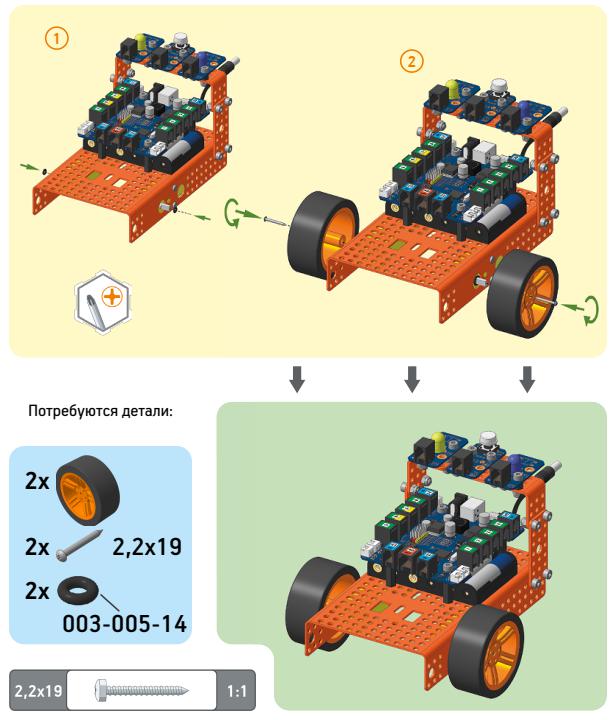
8. Установка колес на мотор-редукторы
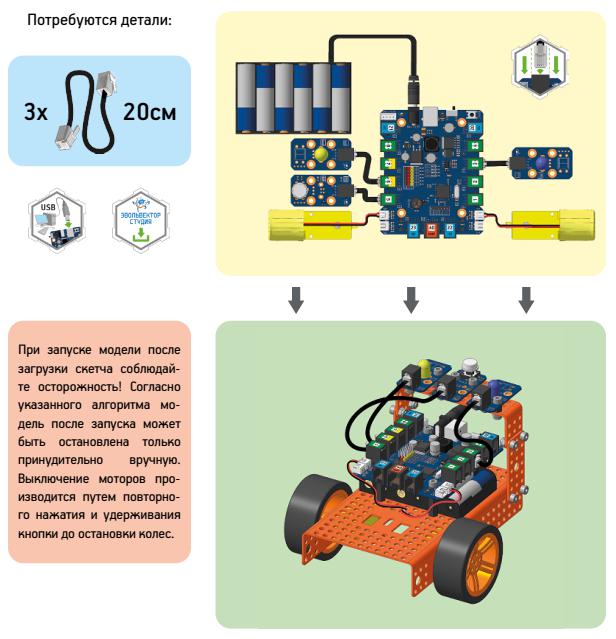
9. Подключение модулей, моторов, питания к контроллеру и загрузка в него программы
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
После того, как модель собрана и в нее загружена соответствующая алгоритму программа, запустите робота. Он должен выполнять действия, описанные ниже на алгоритмической схеме. В действиях, связанных с движением, дополнительно показано продвижение движение робота по траектории.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: