


Проект №2 «Подмигни»

Собранный андроид выглядит харизматично и похож на тех роботов, которые показывают в фантастических фильмах. Однако, совершать физическую работу он пока не способен, поскольку у него нет приводов и системы управления ими.
Поэтому давайте сделаем еще один шаг в сторону настоящего робота и добавим ему электронную систему управления, которая для начала будет управлять только его «глазами».
Конструкция
Итак, в целях функционального приближения модели андроида к настоящему роботу, оснастим его электронной системой управления. Ну а чтобы проект не стал слишком сложным, управлять будем пока только двумя индикаторами, которые визуально будут играть роль глаз у робота.
Центральным и основополагающим элементом управляющей системы будет, разумеется, контроллер Вертор Стандарт. Управлять же он будет, как уже было сказано, двумя индикаторами. Итого, вся электронная система будет представлять собой контроллер, подключенные к нему с помощью кабелей индикаторы и питание в виде батарейного отсека с элементами питания.
Контроллер представляет собой печатную плату, оснащенную разъемами различного функционального назначения. Есть разъем для питания,для подключения к компьютеру, для подключения моторов, сервоприводов, датчиков. Основые элементы контроллера показаны на иллюстрации, приведенной ниже.
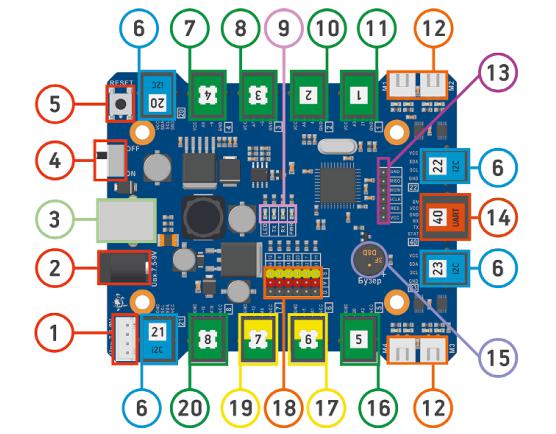
1. Разъем питания от аккумуляторного модуля;
2. Разъем питания 5,5х2,1 мм от внешнего источника с напряжением 7,5-9 В;
3. Разъем USB-В для подключения контроллера к компьютеру;
4. Выключатель внешнего питания;
5. Кнопка перезагрузки контроллера;
6. Разъемы №20, 21, 22, 23 для подключения устройств с интерфейсом I2C;
7. Разъем №4 с аналоговой и цифровой линиями с поддержкой ШИМ;
8. Разъем №3 с аналоговой и цифровой линиями с поддержкой ШИМ;
9. Светодиодные индикаторы работы контроллера;
10. Разъем №2 общего назначения с аналоговой и цифровой линиями;
11. Разъем №1 общего назначения с аналоговой и цифровой линиями;
12. Разъемы M1...M4 для подключения моторов;
13. Контакты для подключения устройств по интерфейсу SPI;
14. Разъем №40 для подключения устройств по интерфейсу UART;
15. Встроенный звуковой излучатель (пассивный бузер);
16. Разъем №5 общего назначения с аналоговой и цифровой линиями;
17. Разъем №6 с аналоговой и цифровой линиями с поддержкой ШИМ;
18. Контакты для подключения сервоприводов (пины 11, 7, 23, 22, 8, 12);
19. Разъем №7 с аналоговой и цифровой линиями с поддержкой ШИМ;
20. Разъем №8 с аналоговой и цифровой линиями с поддержкой ШИМ.
Разъемы, к которым подключаются другие элементы управляющей системы, еще называются портами. Они имеют свою маркировку, которая в том числе используется для программирования.
Алгоритм
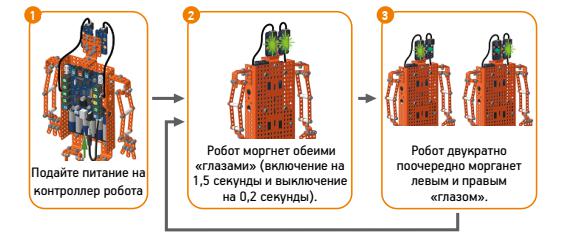
Вот тут, в этом проекте уже появляется алгоритм. Робот будет выполнять действия. Пускай и очень примитивные, но действия. Так как у него в распоряжении есть только светодиодные индикаторы, то единственное, что он может делать — это моргать ими (отсюда и название проекта «подмигни»). Поэтому заложим в него следующие действия:
1. Двухкратное моргание обеими «глазами» (включение двух индикаторов на 1,5 секунды и выключение их на 0,2 секунды)
2. Двухкратное поочередное моргание левым и правым «глазом». Соответственно эти действия будут бесконечно повторяться.
Сборка
Выполните досборку модели в части крепления к механической конструкции электронных элементов согласно ниже приведенным схемам сборки.
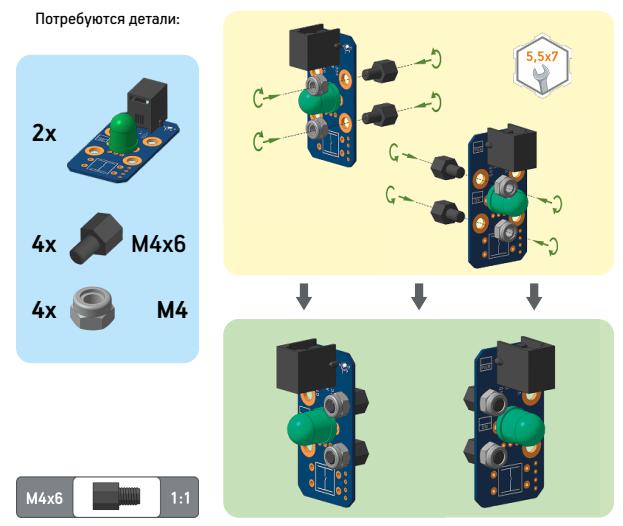
1. Установка на андроида «глаз» в виде светодиодных индикаторов
1.1 Подготовка модулей к установке
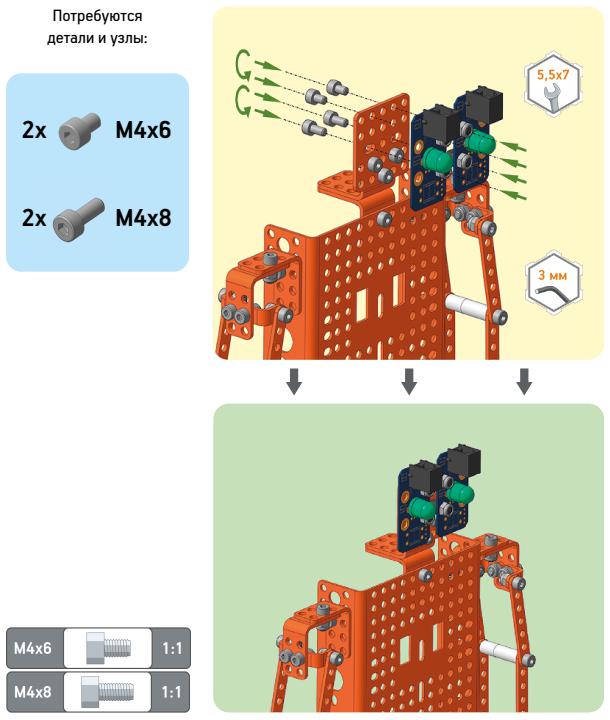
1.2 Монтаж модулей на «голову» андроида
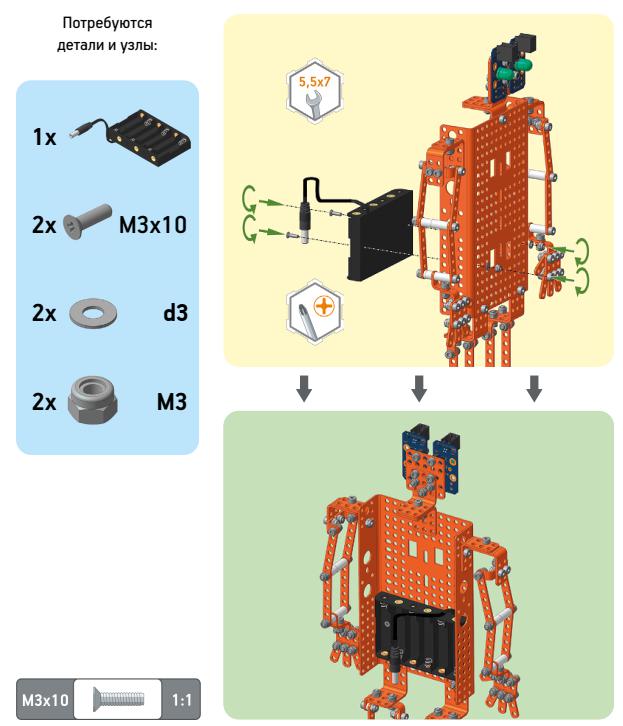
2. Установка источника питания
2.1 Крепление к туловищу батарейного отсека
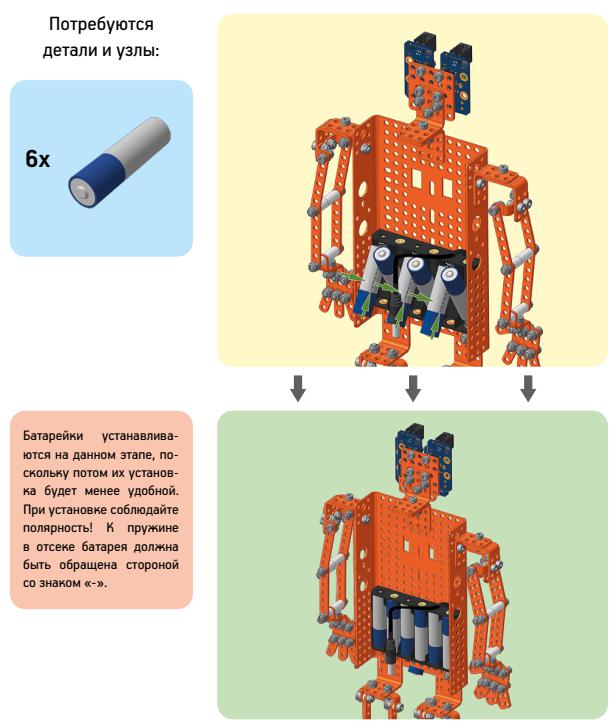
2.2 Помещение элементов питания в батарейный отсек
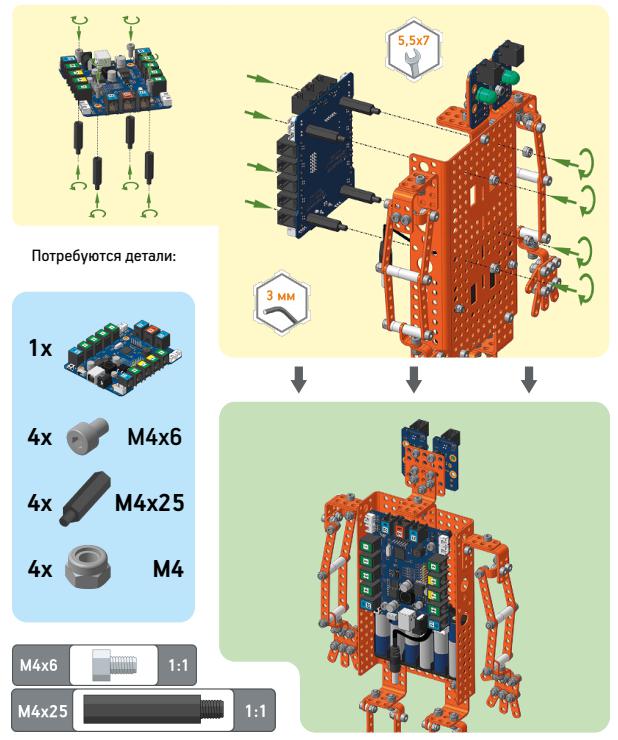
3. Установка контроллера на туловище андроида
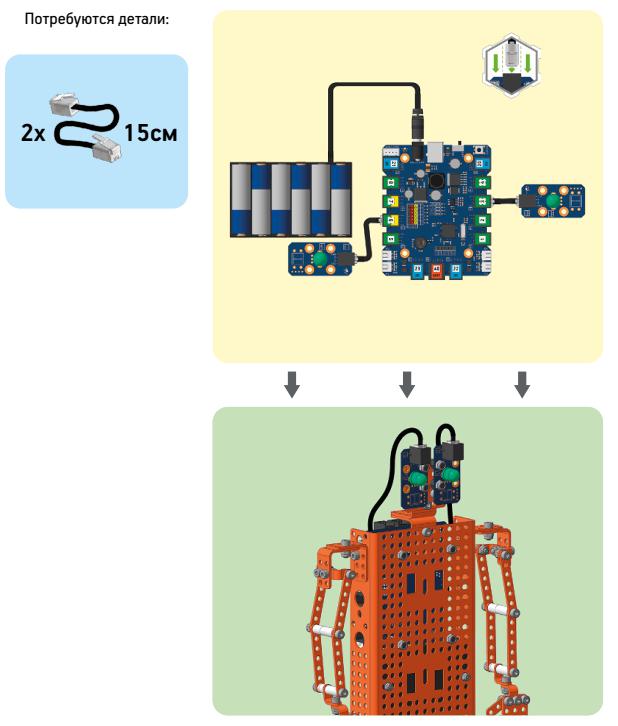
4. Подключение электронных модулей и источника питания к контроллеру
5. Подключение контроллера робота к компьютеру и загрузка скетча
1. Подключение к компьютеру
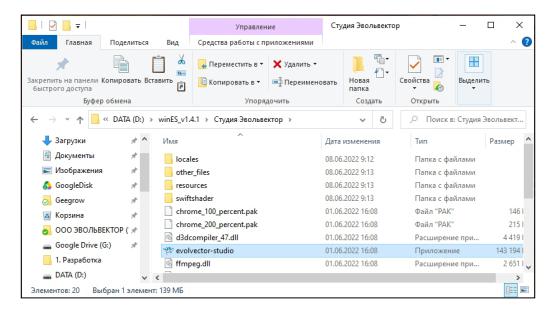
2. Переместите папку со средой программирования «Студия Эвольвектор» с DVD диска на свой компьютер в любое удобное место. Или скачайте указанное программное обеспечение с сайта Академии Эвольвектор по адресу: academy.evolvector.ru/studio_evolvector_download
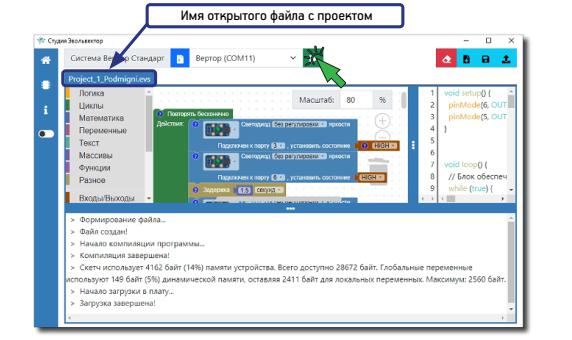
3. Запустите среду программирования, дважды кликнув левой кнопкой мыши по файлу evolvector-studio в папке с приложением.
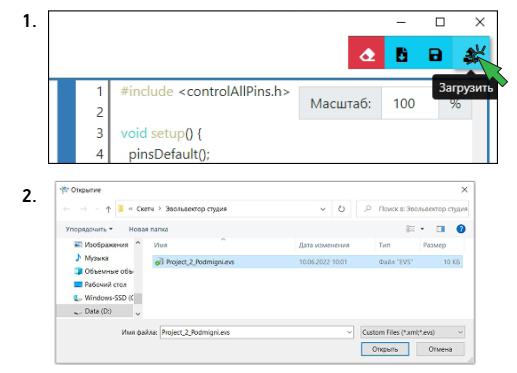
4. Откройте в приложении файл с расширением .evs, содержащий программу для данного проекта. Его можно взять с DVD диска к конструктору. Скетчи находятся в папках с проектами.
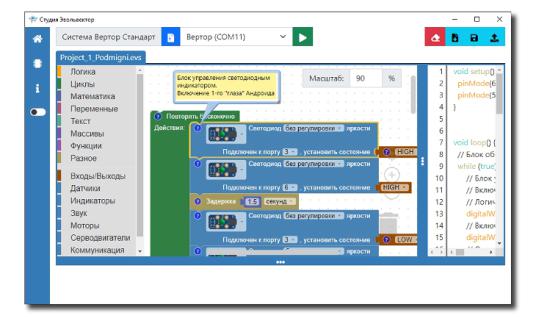
5. В открывшейся программе можно прочитать комментарии к каждому блоку, чтобы узнать какое действие он выполняет. Для вызова комментария к блоку нажмите на значок в виде синего кружочка с вопросиком, который размещается в верхнем левом углу блока. Для сворачивания открытого комментария необходимо нажать на этот значок повторно.
6. Загрузите скетч в контроллер, нажав на кнопку загрузки вверху и дождитесь сообщения о том, что загрузка успешно завершена.
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
После сборки робота и загрузки программы обязательно надо проверить правильность его функционирования. Для того он и был собран, чтобы работать и выполнять возложенные на него функции.
Если в процессе сборки все было сделано верно, то робот должен работать по алгоритму, показанному ниже на графической схеме.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: