


Проект №1 «Андроид»

Если вы решили заниматься робототехникой, то возникнет очень непростой вопрос. С чего начать?
В поиске ответа на него напрашивается простая логика. Поскольку робот должен делать работу взамен человека, то и выглядеть он должен похожим образом. У него должны быть руки и ноги, ну и, разумеется, голова. Иначе как он будет эту работу выполнять?

Ну что ж, давайте сконструируем такого робота из тех деталей, которые нам доступны.
Конструкция
Слово Андроид происходит от греческого Άνήρ - «человек, мужчина», к которому добавлен суффикс -oid, означающий «подобие». Таким образом андроид - это значит человекоподобный или антропоморфный. Андроидами обычно называют роботов гуманоидов или синтетические организмы, предназначенные для того, чтобы выглядеть и действовать, как человек.
У человека можно выделить части, из которых он состоит. Это руки, ноги, туловище и голова.

Для определения конструкции андроида, необходимо составить каркас с выявлением подвижных и неподвижных элементов, который обеспечит функциональную схожесть с человеком. Места, в которых один элемент конструкции должен двигаться относительно другого, отмечены пустотелыми кружочками.
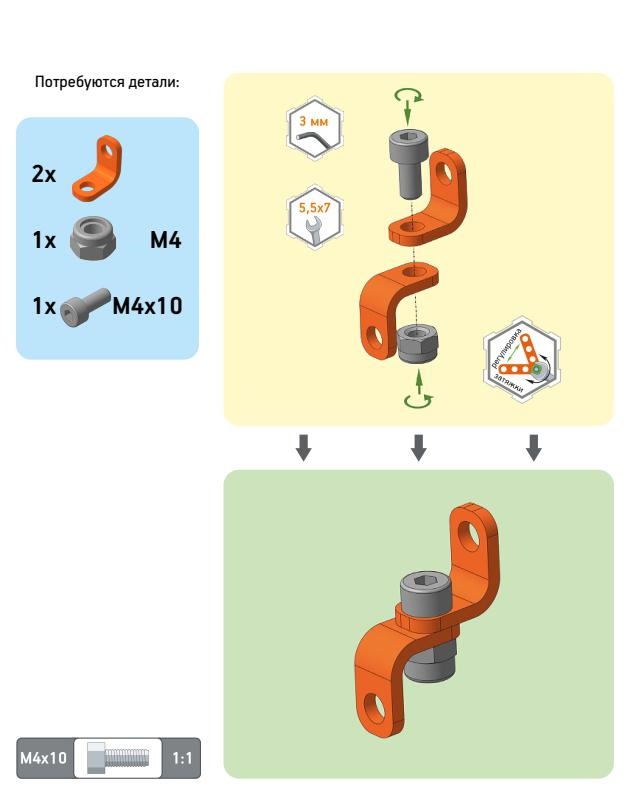
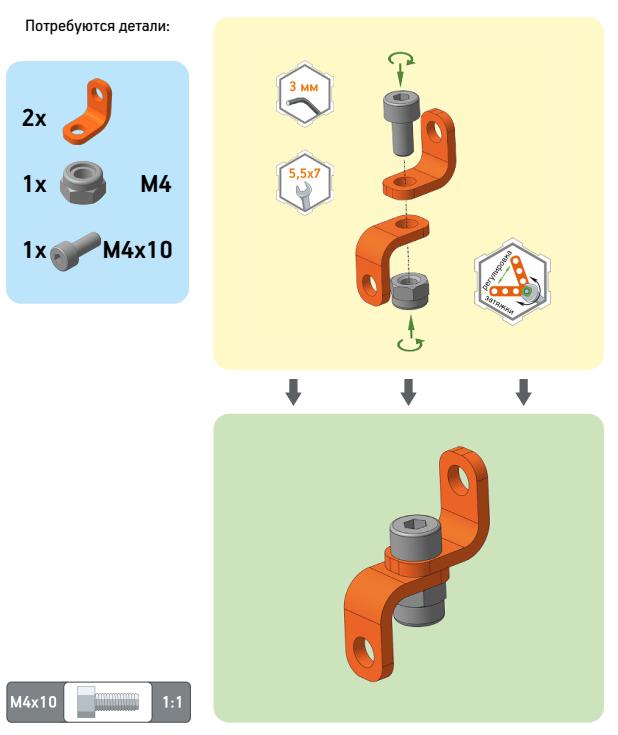
Такие подвижные соединения деталей называются шарнирами. В начальном проекте по конструированию роботов будем использовать самый простой вариант шарнира— цилиндрический.
Таким образом, организовав шарниры в нужных местах каркаса, и правильно подобрав детали, формирующие каркас, можно собрать конструкцию, похожую на человека и обладающую схожей подвижностью.

Алгоритм
Конструкцию, которую вы соберете в первом своем проекте, конечно, настоящим роботом назвать будет нельзя. Андроид - это просто модель, которая имеет черты сходства с человеком. Целью первого проекта в первую очередь является получение навыков работы с деталями и с их крепежом. Поэтому говорить о каком-либо алгоритме в стартовом проекте не приходится. Можно лишь рассуждать о некоторых функциональных особенностях модели. Например о том, что андроида можно ставить в разные позы и изучать с помощью него устойчивость конструкции на опорных поверхностях.
Сборка
Соберите модель робота в соответствии с ниже изложенной схемой сборки.
В процессе сборки обратите внимание на то, как достигается подвижность элементов конструкции. Потренируйтесь в настройке степени подвижности шарниров путем разного усилия затяжки.
Убедитесь в стойкости соединений по отношению к раскручиванию при использовании гаек с пластиковым контрением.
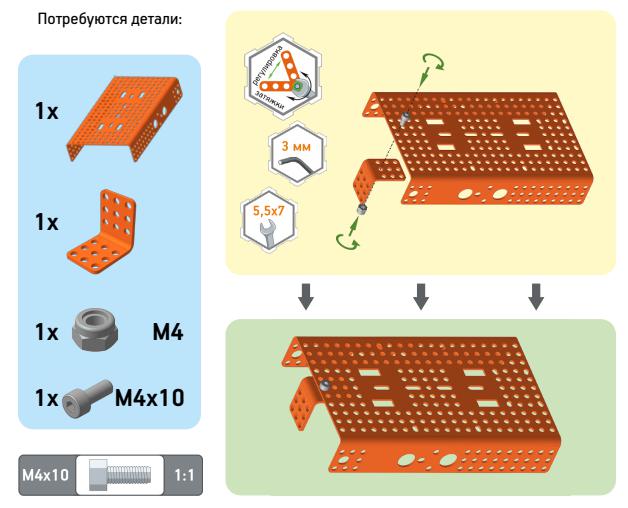
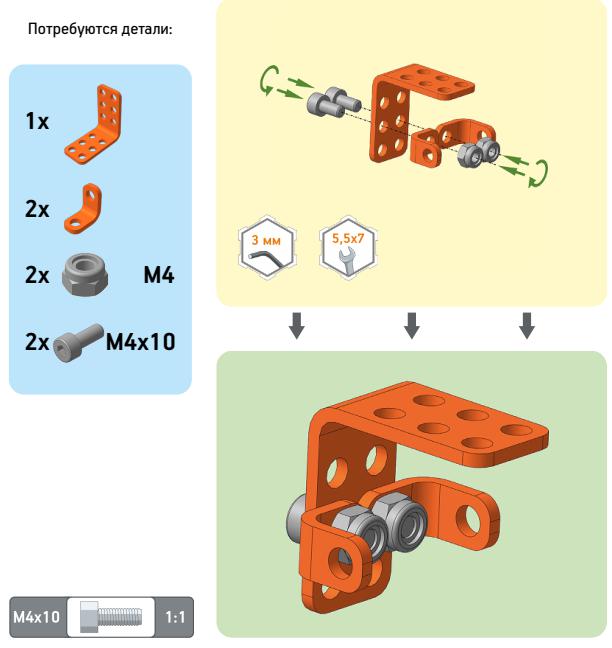
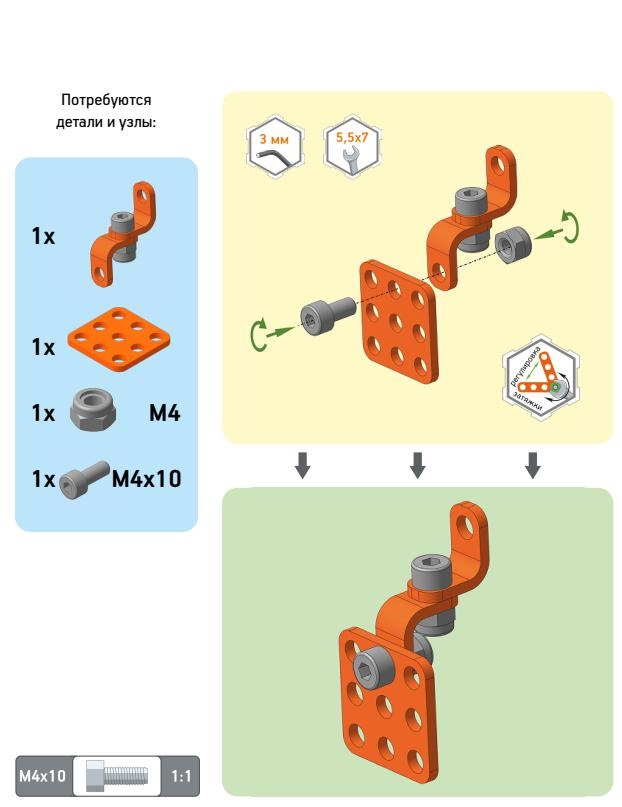
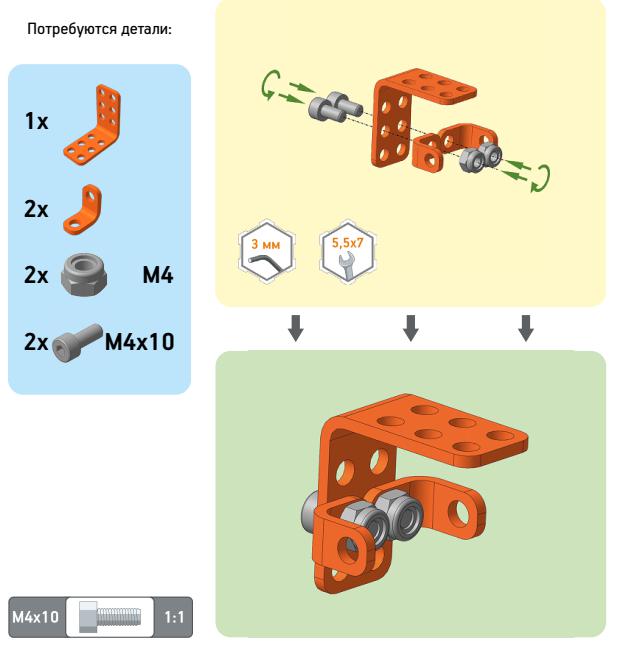
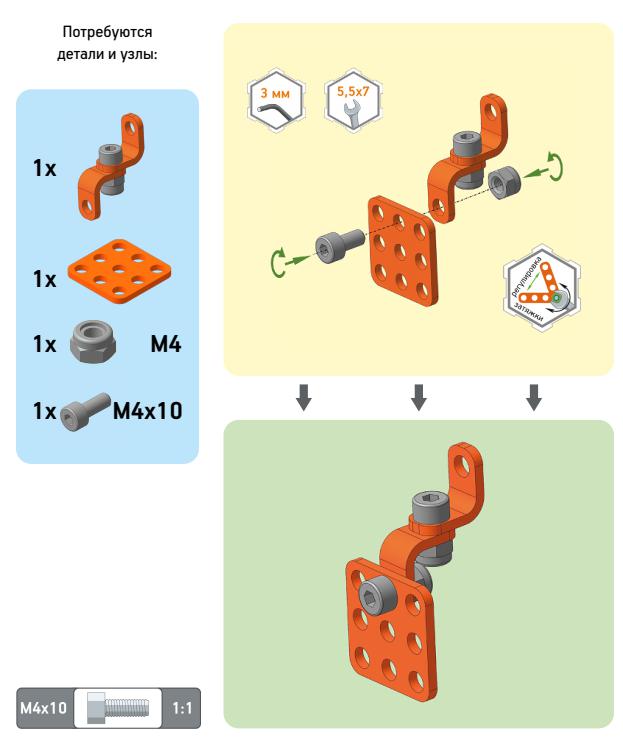
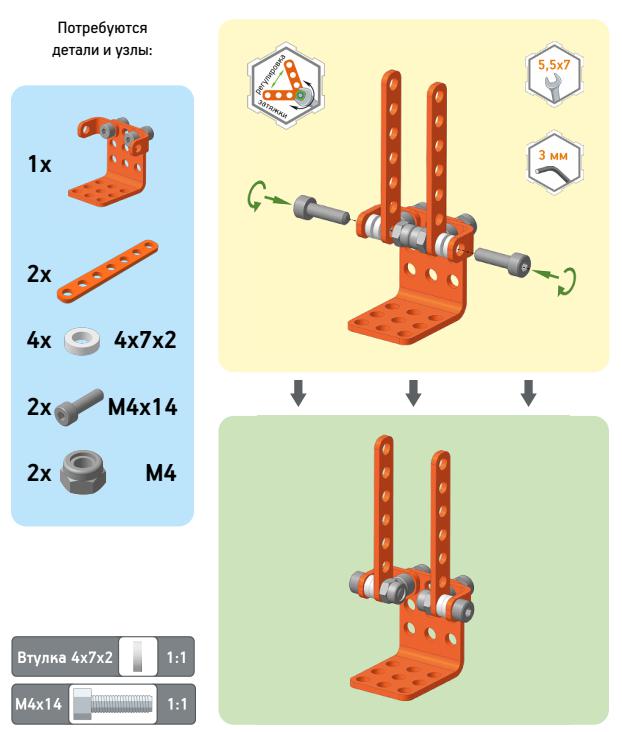
1. Крепление опоры «шеи» андроида
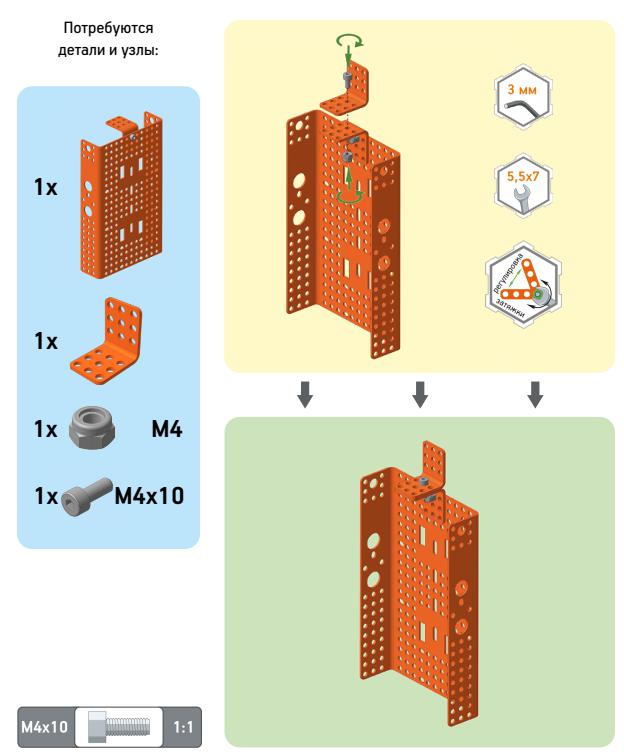
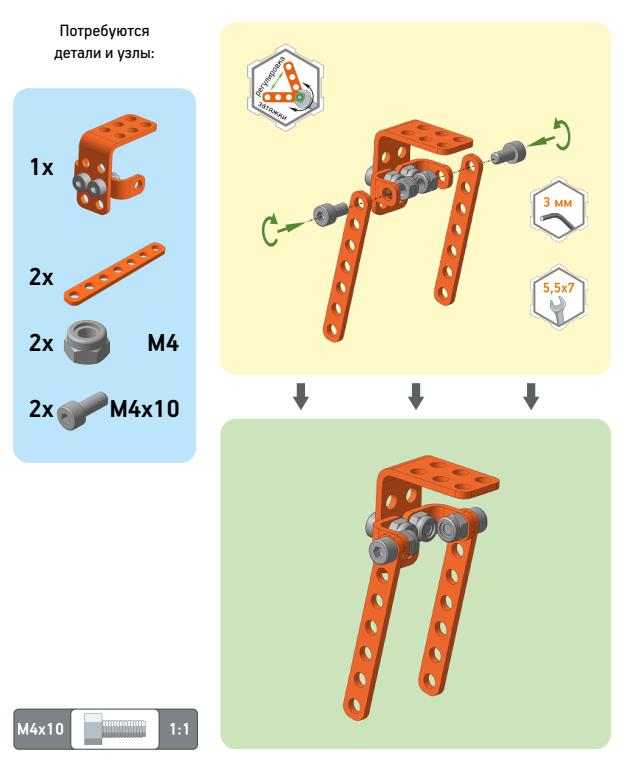
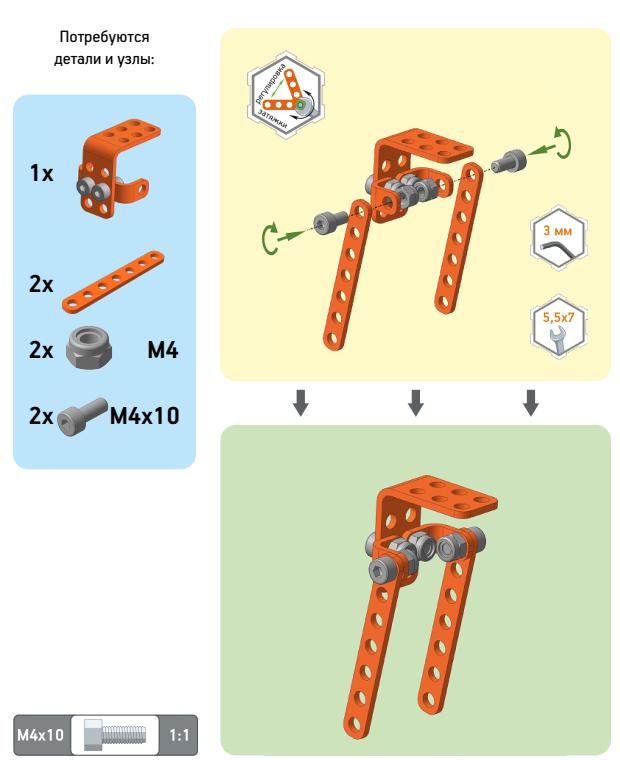
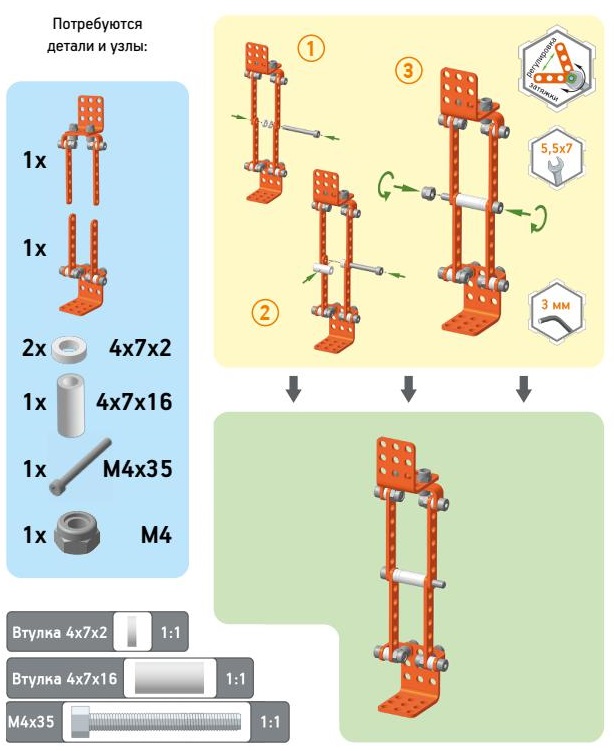
2. Установка «шеи» андроида на опору
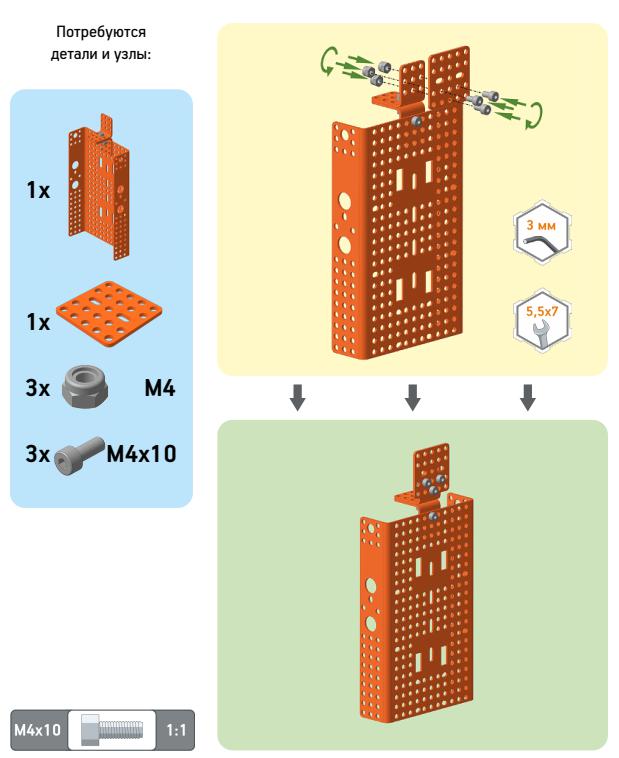
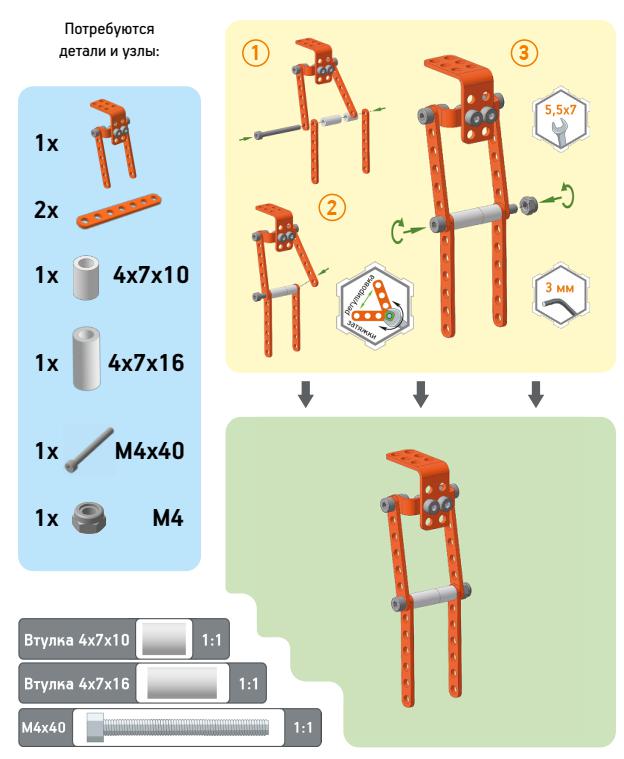
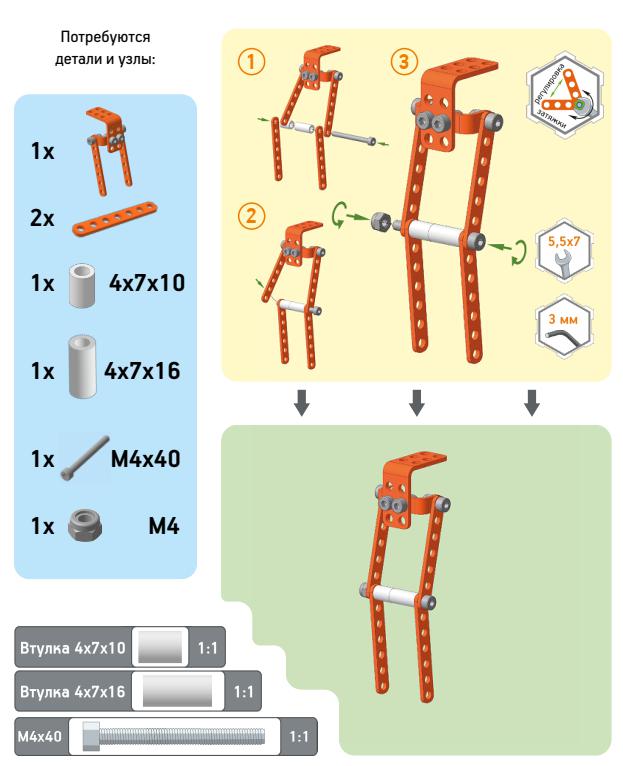
3. Крепление «головы» андроида к «шее»
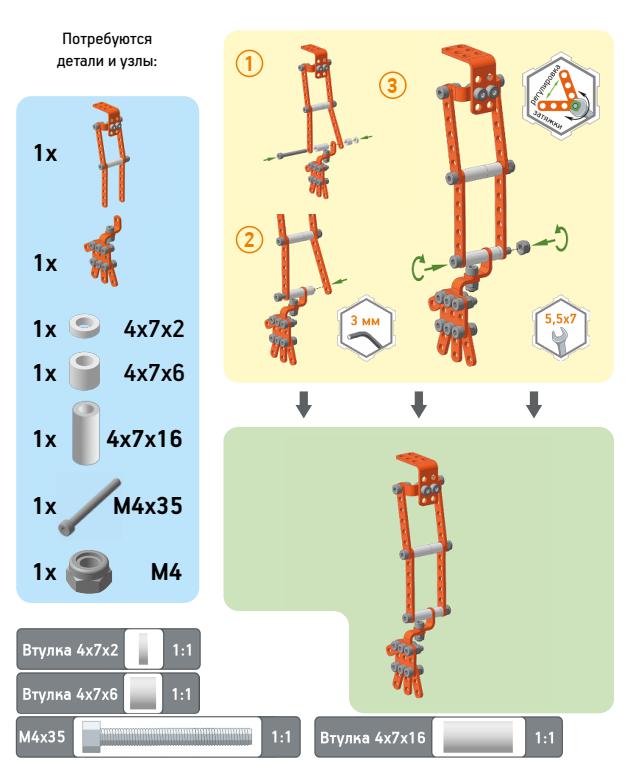
4. Сборка левой «руки»
4.1 Сборка «предплечья»
4.2 Сборка «плеча» левой «руки»
4.3 Сборка «локтевого сустава» левой «руки»
4.4 Сборка «кисти» левой «руки»
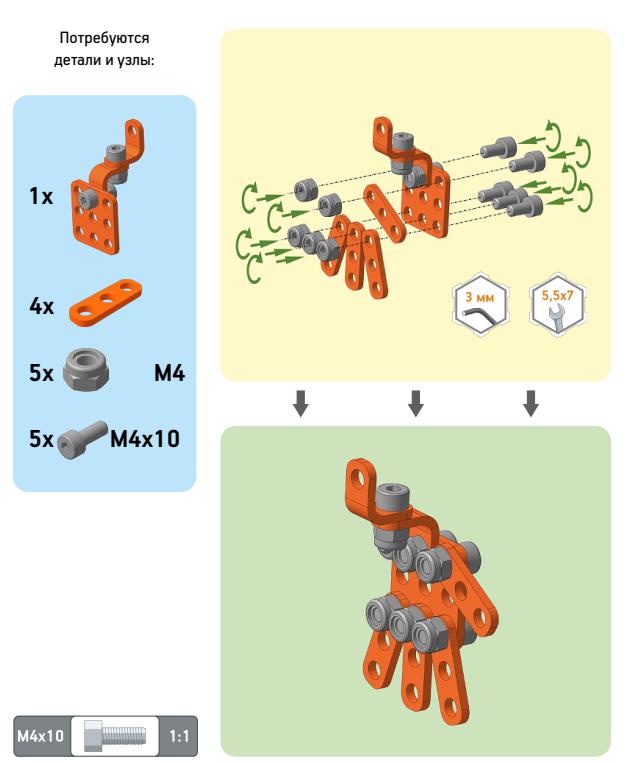
4.4.1 Сборка основания «кисти»
4.4.2 Крепление «ладони» к основанию «кисти» левой «руки»
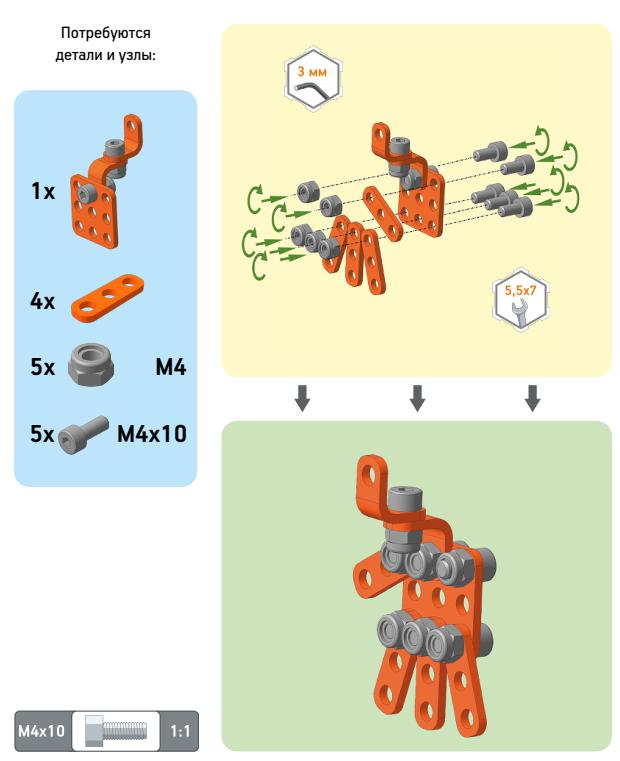
4.4.3 Крепление «пальцев» к «ладони» левой «руки»
4.5 Соединение «кисти» с левой «рукой»
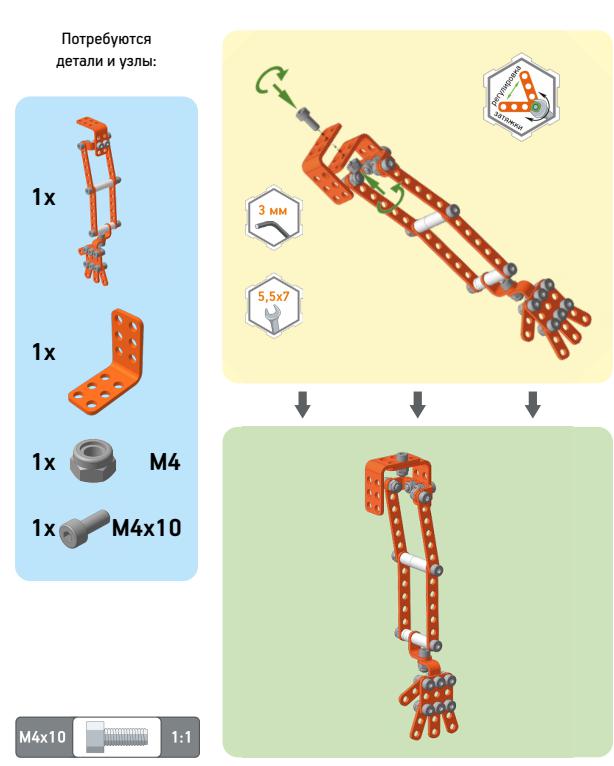
4.6 Соединение основания с левой «рукой»
5. Сборка правой «руки»

5.1 Сборка «предплечья»
5.2 Сборка «плеча» правой «руки»
5.3 Сборка «локтевого сустава» правой «руки»
5.4 Сборка «кисти» правой «руки»
5.4
5.4.1 Сборка основания «кисти»
5.4.2 Крепление «ладони» к основанию «кисти» правой «руки»
5.4.3 Крепление «пальцев» к «ладони» правой «руки»
5.5 Закрепление «кисти» на правой «руке»
5.6 Соединение правой «руки» с основанием
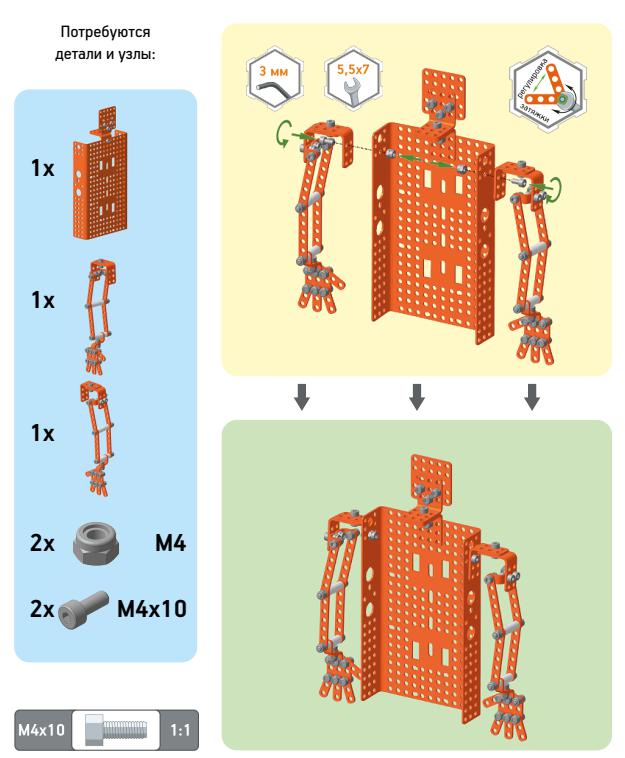
6. Крепление «рук» к раме
7 Сборка «ноги» андроида

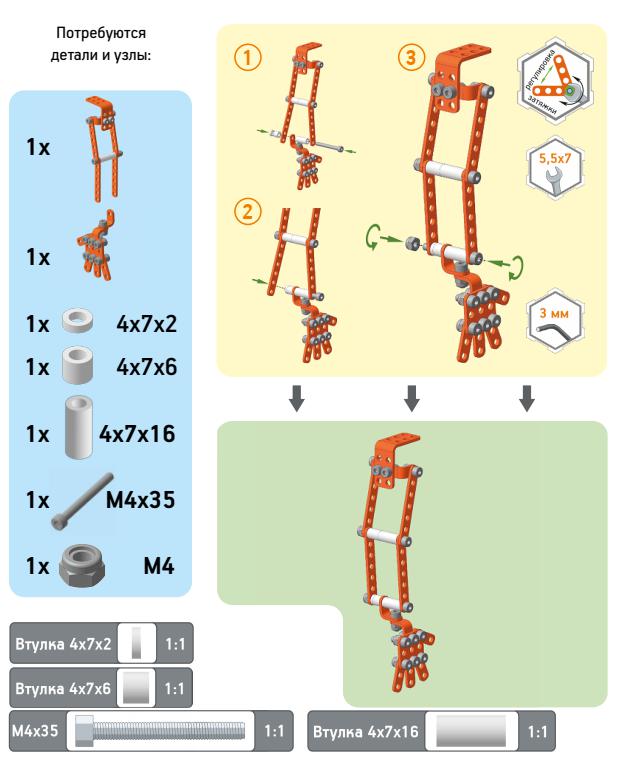
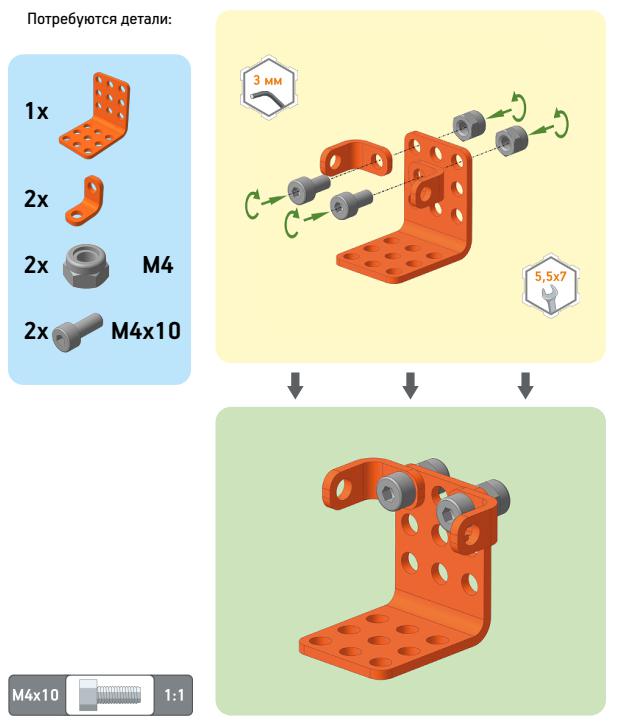
7.1 Сборка верхней части «ноги»
7.2 Добавление «бедра» к верхней части
7.3 Сборка нижней части «ноги»
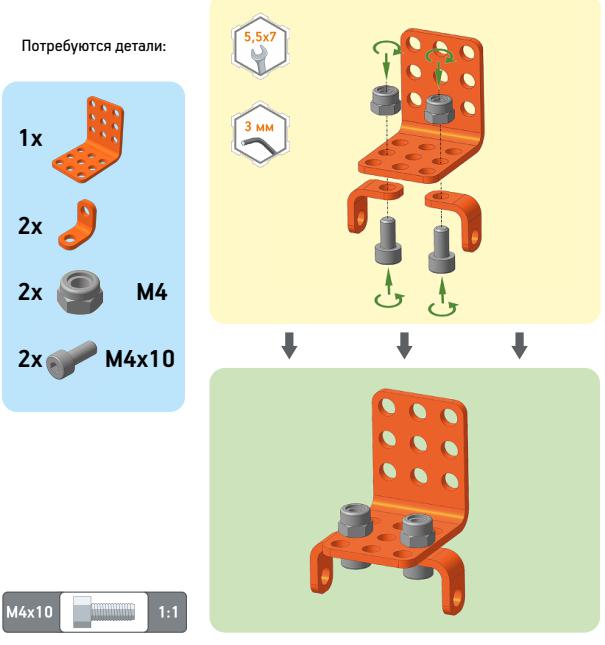
7.3.1 Сборка «стопы»
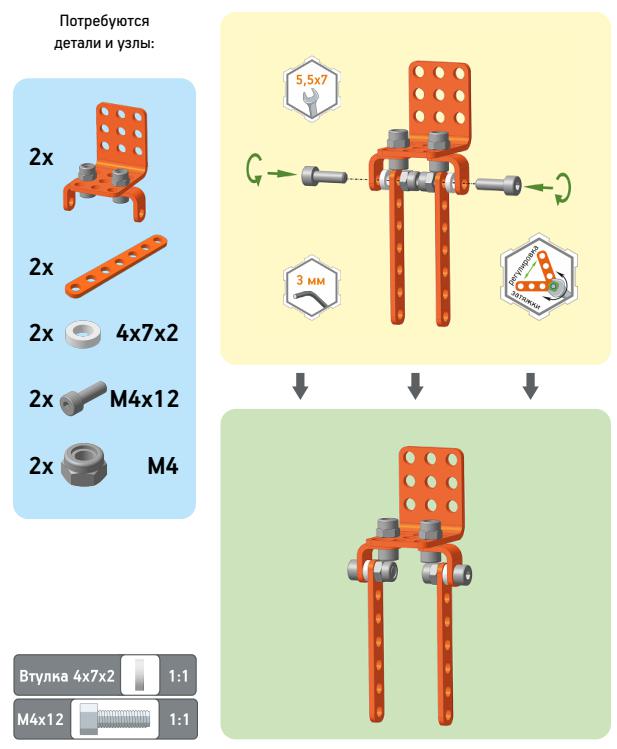
7.3.2 Добавление «голени» к нижней части «ноги»
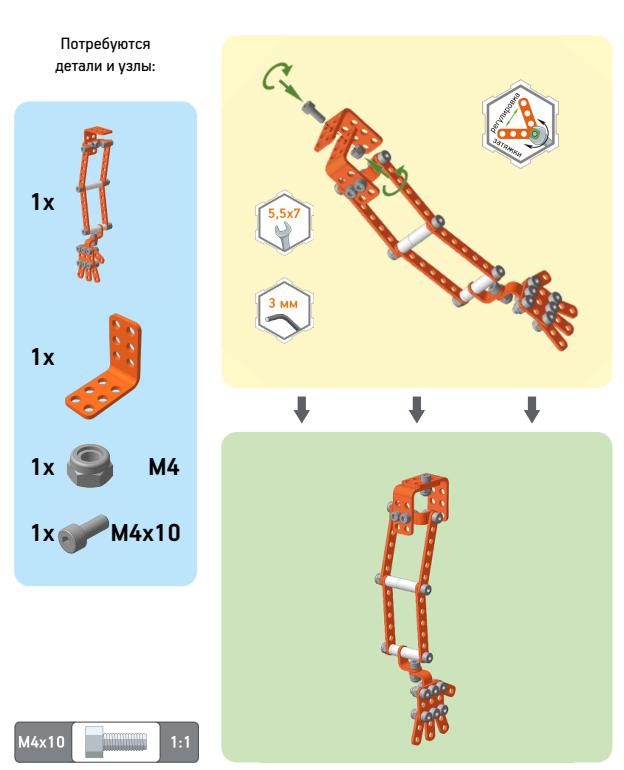
7.4 Окончательная сборка «ноги»
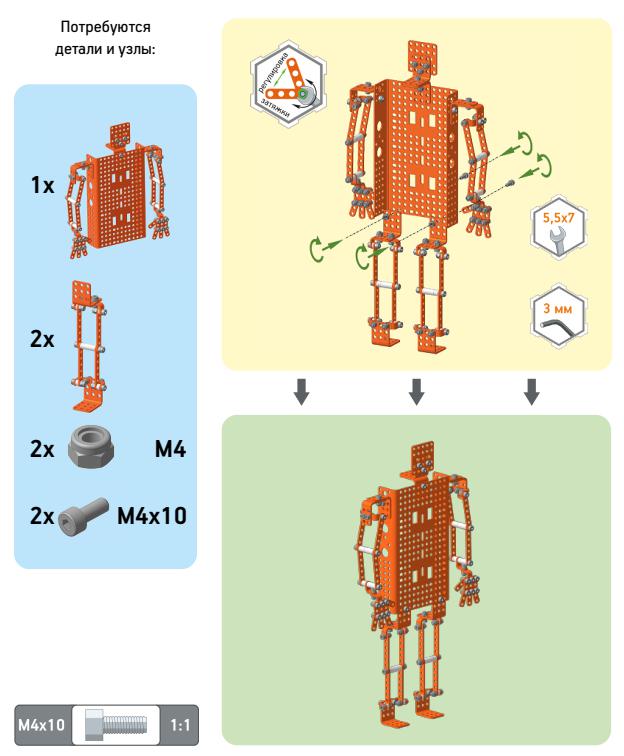
8 Монтаж «ног» на раму
Проверка в работе
У собранной модели робота пока еще нет контроллера и приводов, которые могли бы приводить его в движение, поэтому проверять особо нечего. Однако, в силу особенности конструкции андроида с ним можно провести эксперименты по изучению принципов устойчивости конструкции. Понимание данных принципов будет необходимо в дальнейших проектах для создания устойчивых моделей, которые не будут склонны к опрокидыванию.
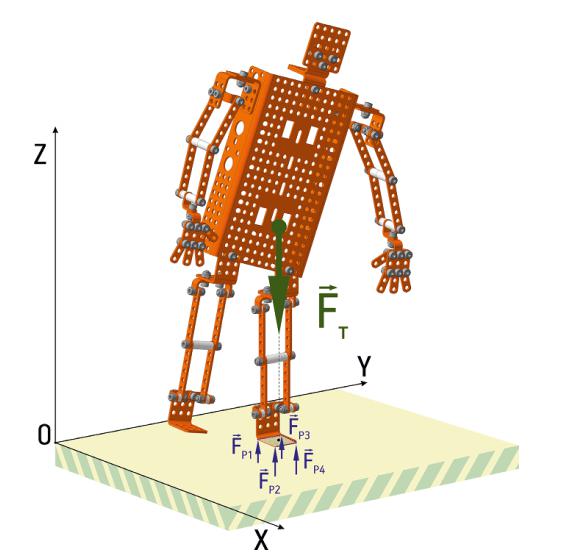
Любой робот будет устойчив тогда, когда точка пересечения линии вектора силы тяжести с опорной поверхностью находится внутри поля устойчивости, образованного силами реакции опоры.
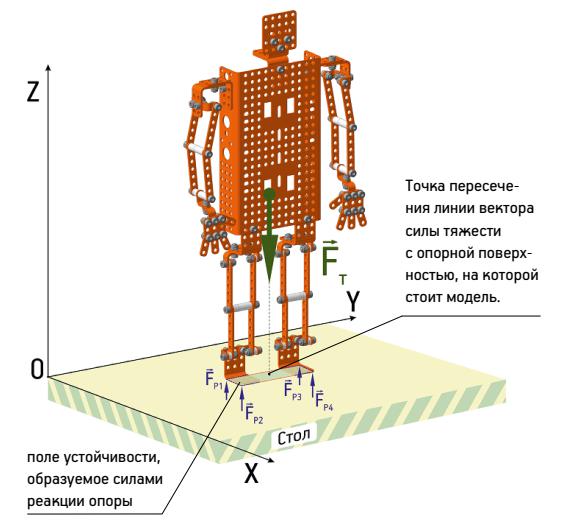
Степень устойчивости конструкции зависит от размера поля устойчивости, образуемого силами реакции опоры: чем больше поле устойчивости, тем устойчивей модель.
Экспериментально сравните устойчивость модели на одной и двух ногах. Поэкспериментируйте с разными позами и зависящей от этого высотой модели. Определите при каких условиях модель наиболее устойчива.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: