


Проект № 16 Фигурист

Цели проекта:
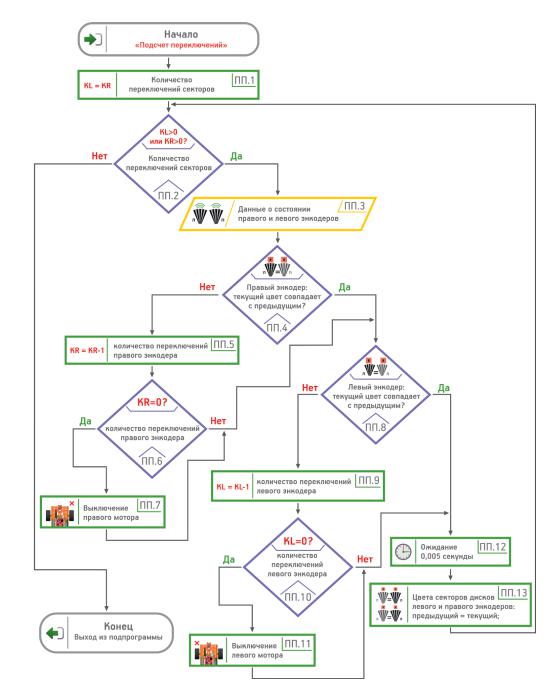
1. Изучение принципа действия оптического энкодера, определяющего угол поворота ведущего колеса робота.
2. Знакомство с принципом использования энкодера для навигации робота.


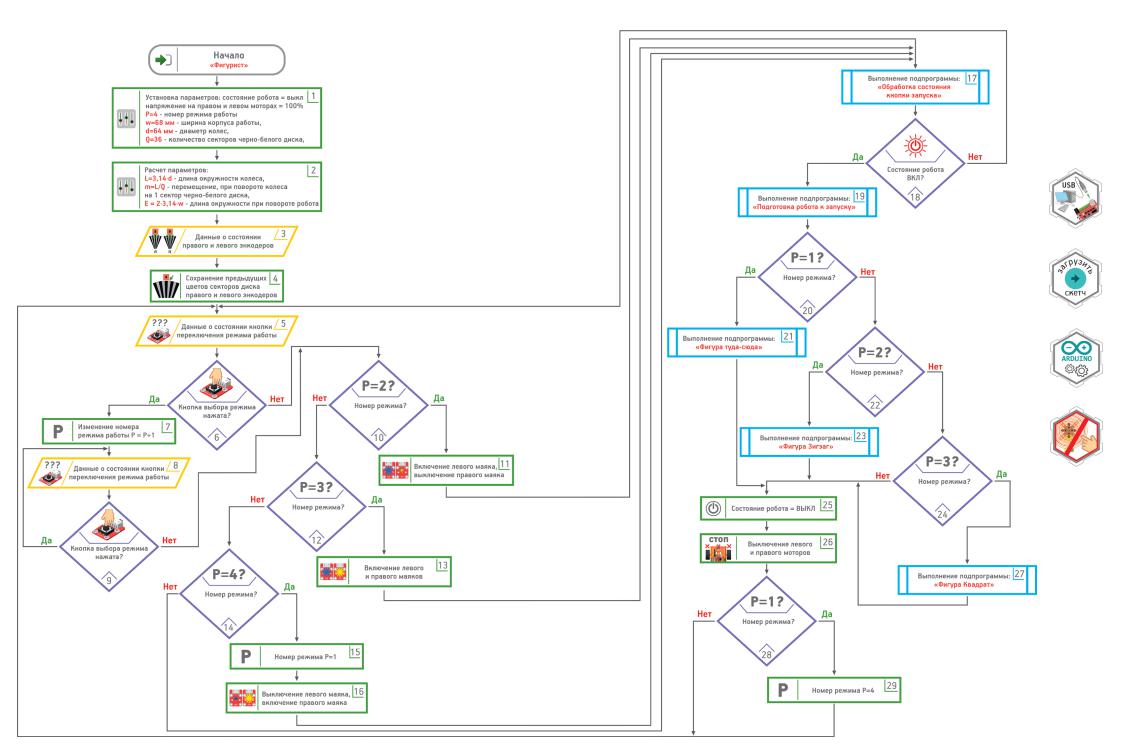
Скетч, реализующий указанный алгоритм можно скачать по ссылке:
academy.evolvector.ru/robo_proekt16_figurist
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: