


Проект №20 «Погрузчик»

Жизнь нашей цивилизации сопряжена с перемещением огромного количества грузов. Это и стройматериалы, и продовольствие, и всевозможное оборудование. Можно привести миллион примеров видов сырья, комплектующих и товаров, которые перевозятся различным транспортом и которые, естественно, надо грузить на этот транспорт и разгружать.
Погрузо-разгрузочные работы сложны только тем, что они связаны с подъемом тяжестей, имеющих очень большой вес. А в отношении технической и технологической организации они относительно просты. Поэтому они хорошо поддаются автоматизации. Мобильным роботам такие задачи вполне по плечу.


Конструкция
Если стоит задача создать робота для разгрузки, перемещения, или погрузки груза, то его можно назвать роботом-погрузчиком по аналогии с уже существующими машинами такого рода. Эти машины управляются водителями-операторами, сидящими в кабине внутри. Мы же можем сделать робота, который выполнял бы эту работу самостоятельно либо через дистанционное управление оператором.
Дистанционное управление — это проще для программирования и интереснее с точки зрения игровых экспериментов с роботом. Поэтому сделаем его под управлением ИК-пульта, а это значит, что на роботе надо будет оставить инфракрасный приемник сигналов с предыдущего проекта.
Да и все остальное надо также оставить, кроме механической футбольной «ноги». Ее потребуется заменить на подъемный механизм.
Опять же для простоты этот механизм целесообразно сделать параллелограммного типа, в котором детали подвижно соединяются в виде параллелограмма. А двигать вверх или вниз его можно с помощью уже полюбившегося серводвигателя. Элементом данного механизма также будут вилы, как у настоящего погрузчика. Ими он будет поддевать грузы и ими же будет их поднимать.
Для того, чтобы данного робота можно было испытать в условиях, приближенных к настоящим, дополнительно можно собрать из деталей конструктора имитацию палеты. Ее робот будет подхватывать и перемещать.
Алгоритм
Алгоритм работы погрузчика будет по сути тем же самым, что и у робота-футболиста, с незначительными изменениями, связанными с особенностями конструкции погрузчика.
Управление движением робота также будет производится с помощью кнопок со стрелочками. А поднятием и опусканием вил пусть будет управлять кнопка ОК по центру между кнопками пульта со стрелочкми.
Помимо этого будут отличия, связанные со спецификой выполнения работ. Погрузо-разгрузочные работы — это опасные в реальной жизни работы. Груз может весить до нескольких тонн. И, если он кого-то заденет или упадет сверху, то это может привести к плачевным последствиям. Поэтому обязательно соблюдение техники безопасности, в рамках которой должно быть предусмотрено звуковое и световое оповещение окружающих о выполнении погрузо-разгрузочных операций. По этой части предусмотрим мигание светодиодов и подачу звуковых сигналов бузером с частотой 5000 Гц, пока происходит поднятие и опускание груза. Если вилки подняты, то оба светодиода будут светиться постоянно (в опущенном состоянии они выключены).
Сборка
В этом проекте отдохнуть от сборки не получится. Нас снова ждет сборка относительно сложного механизма взамен другого сложного механизма из предыдущего проекта. Он также требует отвественного выполнения сборочных операций и настройки подвижных соединений. Цель проекта сводится к освоению нового типа конструкции, который может использоваться для подъема и перемещения предметов.
1.Демонтаж конструкции предыдущего проекта
1.1 Демонтаж боковых направляющих
1.2 Демонтаж футбольного толкателя

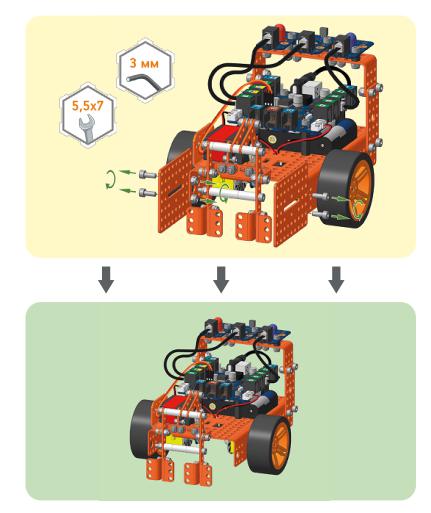
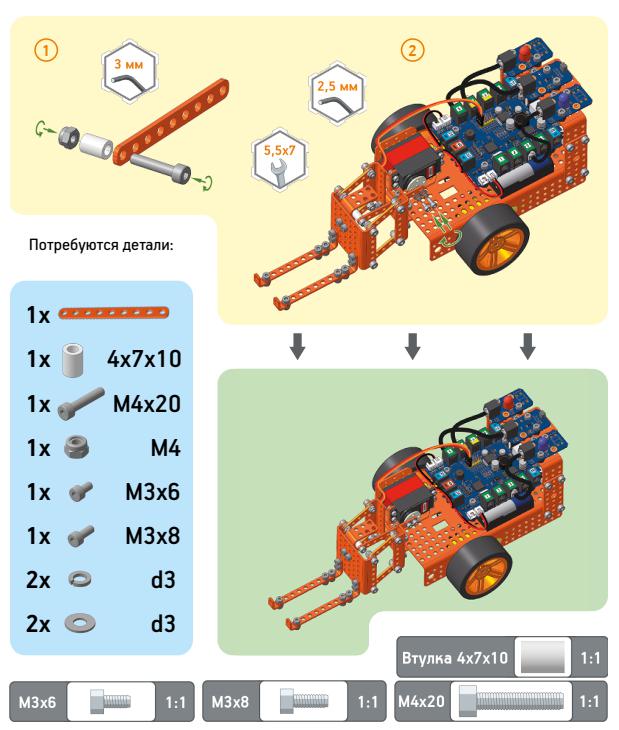
2. Сборка подъемного механизма
2.1 Крепление параллелограммных элементов к корпусу подъемника
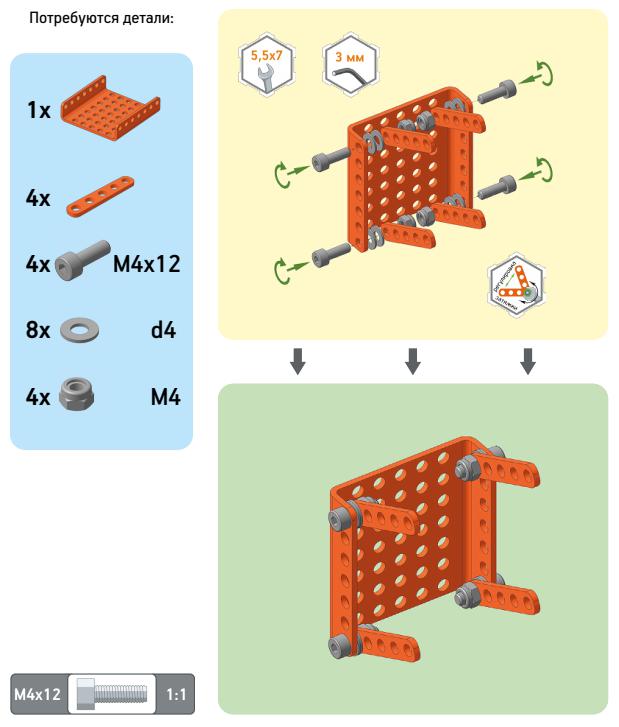
2.2 Крепление стоек к параллелограммным элементам
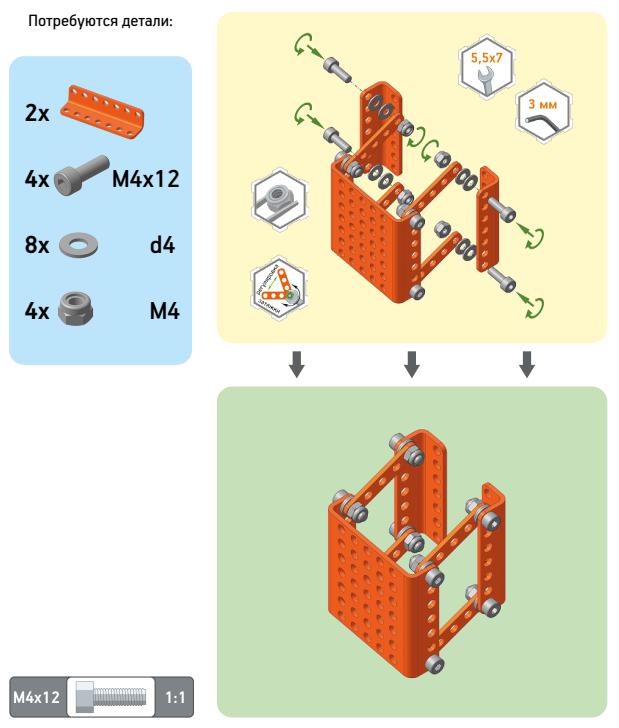
2.3 Крепление кронштейна для последующей установки на шасси

2.4 Крепление подъемного упора
2.5 Сборка подъемной вилки в механизме

3. Установка подъемного механизма на шасси

4. Сборка и монтаж на серводвигатель поднимающего толкателя
4.1 Установка на вал ступицы

4.2 Сборка толкателя и крепление его к ступице
5. Сборка модели паллеты для ее перемещения погрузчиком

6. Подключение электронных модулей и загрузка программы в контроллер
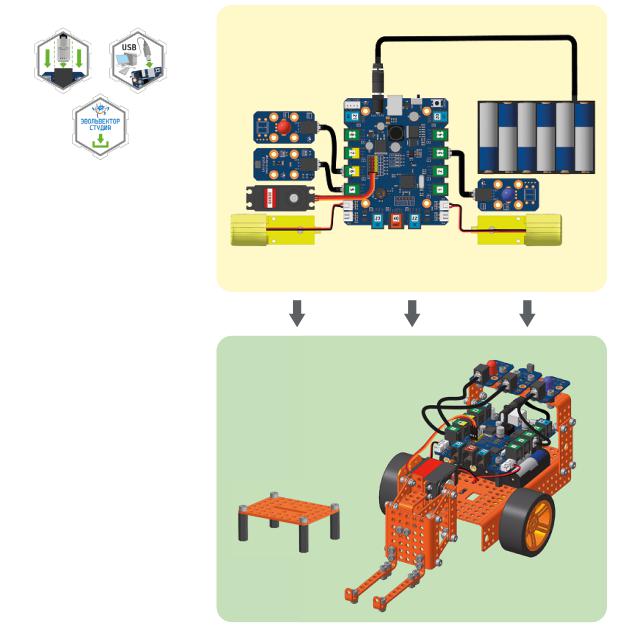
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
Установите робота на площадке, которая подходит для манипуляций с палетой. На палету для натуральности поставьте несколько коробок из под модулей Вертор. Управляя роботом с помощью ИК-пульта попробуйте поднять палету и переместить ее в любое другое место. Управление движением робота выполняется через те же кнопки, что и в проекте с футболистом. Подъем и опускание механизма осуществяется с помощью кнопки ОК, которая находится между кнопками со стрелочками.

Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: