


Проект №19 «Футболист»

Кто не знаком с футболом? Конечно этот вид спорта знают все. Суть игры заключается в том, что игроки команд, нанося ногами удары по мячу и давая друг другу пасы, стараются забить этот мяч в ворота соперника.
Футбол является одной из самых популярных игр в мире. Тут и динамика, и хитрые комбинации, и красивый полет мяча. Все это создает драйв и азарт. Плюс к этому данный вид спорта еще и доступен каждому. Можно взять мяч (он стоит совсем недорого) и пойти играть в любом дворе, на любой поляне. Миллионы мальчишек по всему миру гоняют мяч у себя рядом с домом и мечтают о большом футболе.
Не мудрено, что популярность футбола будоражит умы инженеров-робототехников, стремящихся создать роботов, способных на такую же зрелищную игру.

Конструкция
Для определения конструкции робота надо проанализировать и выявить действия, которые совершают фуболисты во время игры. Их в современном настоящем футболе, конечно, достаточно много. Но основых можно выделить всего несколько:
1. Ведение мяча перед собой.
2. Пас (слабый удар)
3. Удар по воротам (сильный удар)
Поэтому, если мы хотим создать играющего в футбол робота, то должны наделить его хотя бы этими основными навыками.
Возникает вопрос как это сделать. В поисках ответа на него надо опять же посмотреть на то, как это делают спортсмены. Они выполняют данные манипуляции с мячом исключительно ногами. Таковые правила игры в футбол. Отсюда логичный вывод, что робота необходимо оснастить механизмом, который функционально будет работать также, как нога футболиста. Будет толкать мяч вперед, либо бить по нему. Сделать его можно на основе качающегося рычага, к которому прикреплена площадка, чтобы было легко попасть по мячу.
Что касается ведения мяча, то данную задачу можно решить с помощью установки по бокам пластин уловителей, которые будут помогать удерживать мяч рядом с роботом при его поворотах.
Помимо перечисленных механических особенностей конструкции важный момент связан с управлением роботом. К сожалению, мы пока не располагаем техническими средствами, которые позволяли бы наделить робота зрением и искусственным интеллектом, делающими его поведение близким к людям-игрокам. Поэтому остается один выход — делать его с дистанционным управлением. Что, на самом деле, даже интереснее, поскольку вы будете роботом управлять сами и, тем самым, непосредственно участвовать в игре.
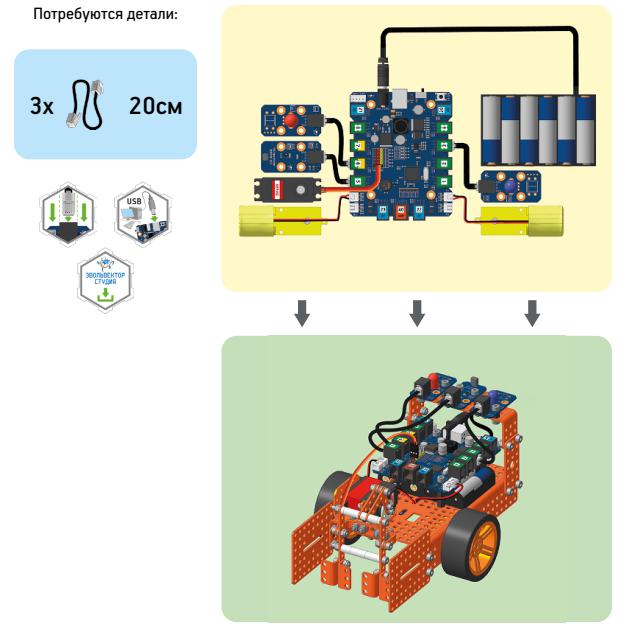
Для дистанционного управления роботом будем использовать инфракрасный пульт. Для приема сигналов от него на роботе потребуется установить приемник данных сигналов.
Алгоритм
Конструкция у робота получается относительно сложной, однако ввиду того, что робот управляется оператором, алгоритм выходит достаточно простым. Надо то всего принимать сигналы от пульта дистанционного управления и выполнять те действия, которые соотвествуют нажатым на пульте кнопкам.
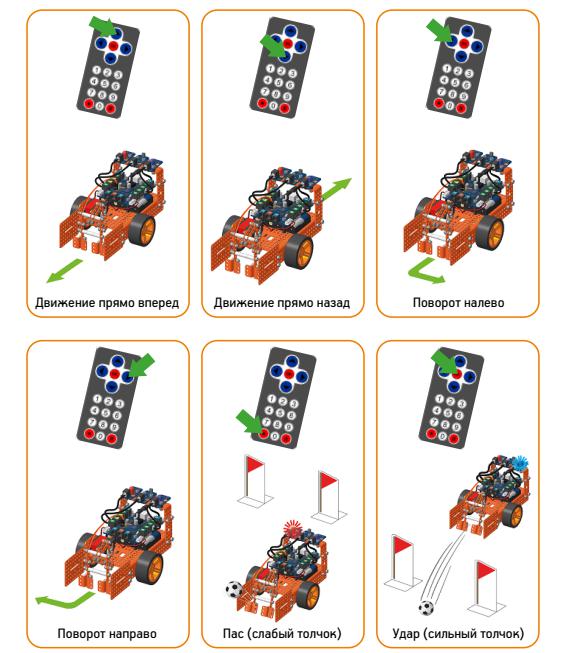
А функции робота согласно нажатым кнопкам заложим следующие:
кнопками со стрелочками выполняется управление движением робота (вперед, назад, влево, вправо);
кнопка с символом * отвечает за пас (слабый удар);
кнопка ОК соответствует удару по воротам (сильному удару).
При этом, если дается пас, то о нем сигнализирует включающийся правый красный индикатор на время движения толкателя. А при выполнении удара загорается левый синий индикатор пока двигается механическая «нога».
Таким образом, можно управлять роботом на футбольном поле и водить мяч, отдавать пасы или бить по воротам, отдавая команды с пульта дистанционного управления.
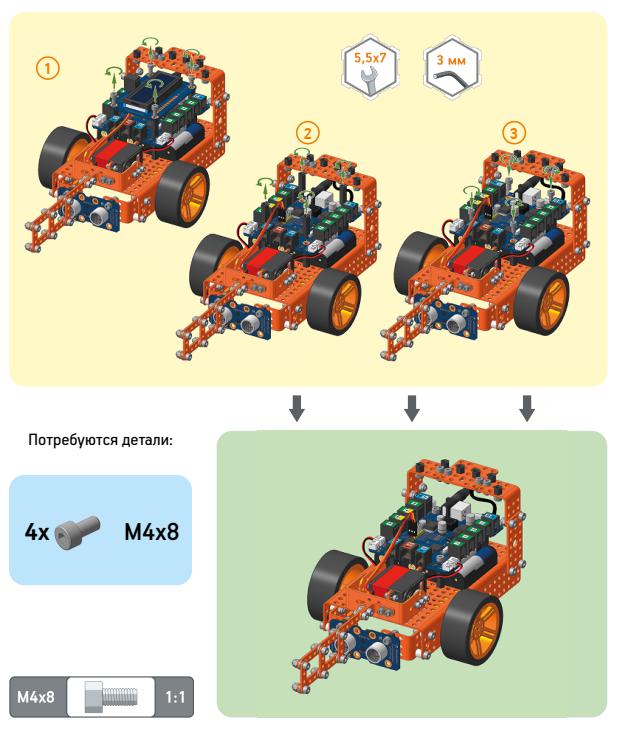
Сборка
Модель робота данного проекта имеет относительно сложный механизм, поэтому придется потрудиться. Сборка требует ответственного подхода, особенно в части настроек механизма, чтобы все шарниры в подвижных соединениях двигались относительно друг друга беспрепятственно. Это позволит в полной мере реализовать потенциал механической «ноги» и насладиться игрой.
Цель — изучить особенности применения инфракрасного дистанционного управления и получить навыки в работе с ним в процессе управления мобильными роботами.
1. Демонтаж конструкции предыдущего проекта
1.1 Отключение элеактронных модулей

1.2 Демонтаж кнопок

1.3 Снятие с контроллера ЖК-индикатора и замена стоек обратно на винты
1.4 Демонтаж поворотного кронштейна со шлагбаумом
1.5 Демонтаж серводвигателя

1.6 Демонтаж кронштейна серводвигателя

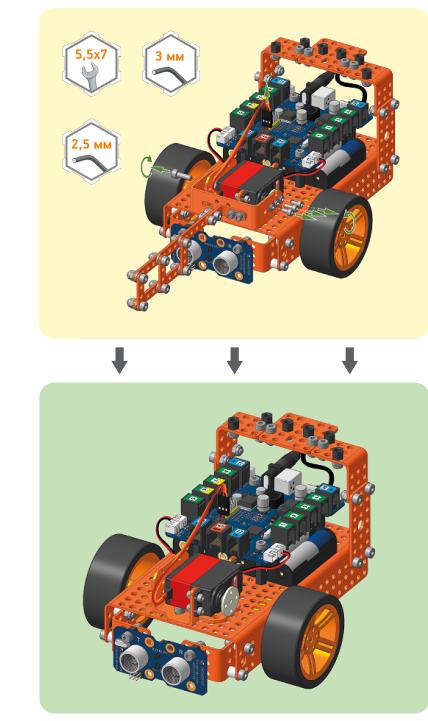
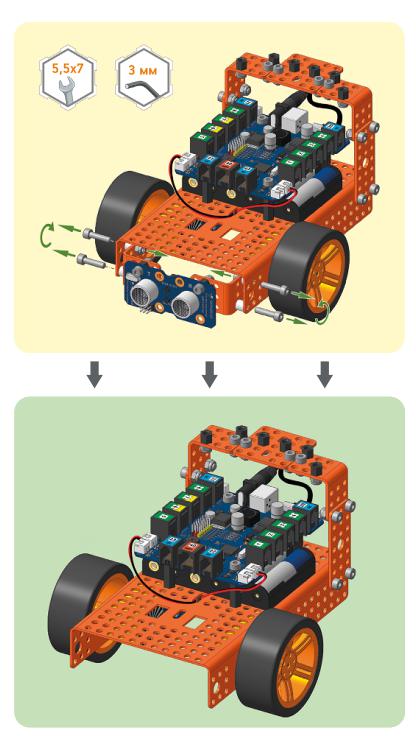
1.7 Демонтаж ультразвукового дальномера
2. Сборка основания для крепления толкателя мяча к раме
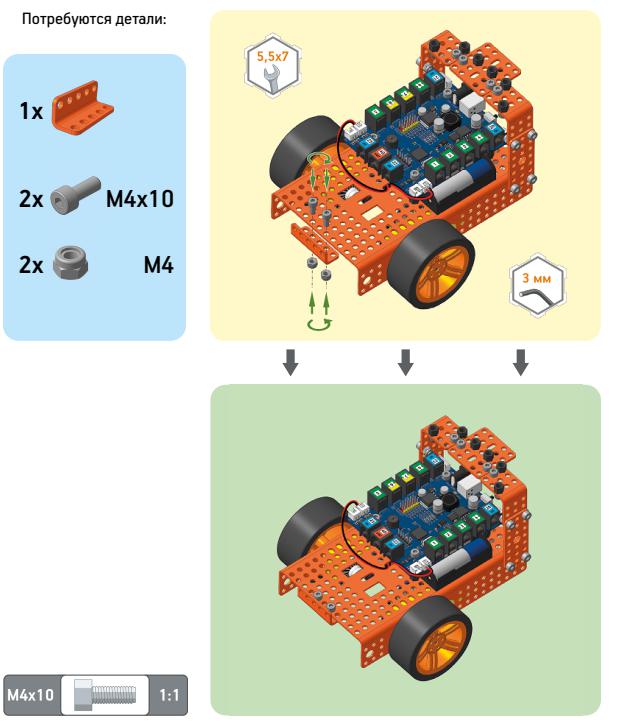
2.1 Крепление угловой балки
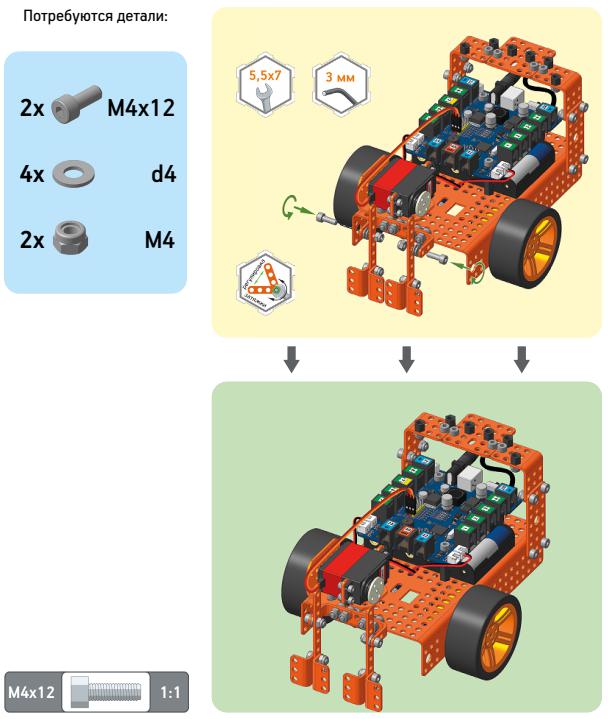
2.2 Монтаж уголковых держателей толкателя

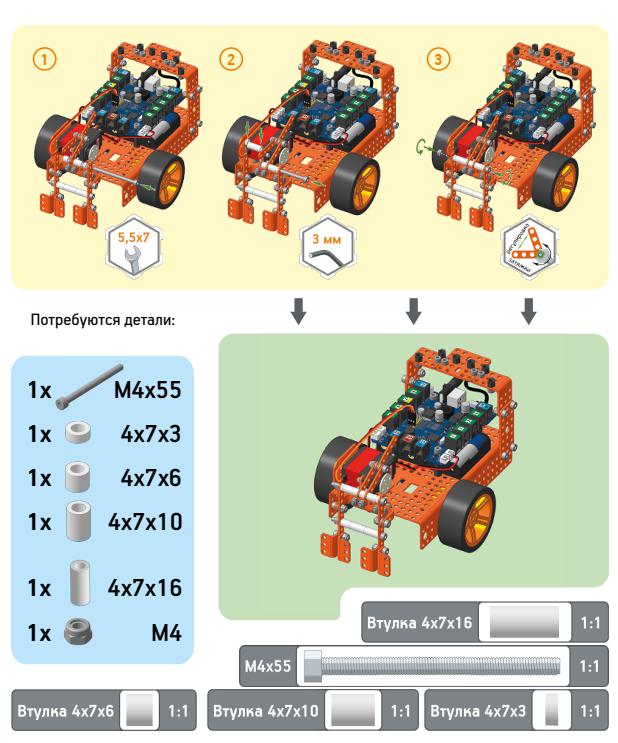
3. Установка привода толкателя
3.1 Монтаж кронштейна

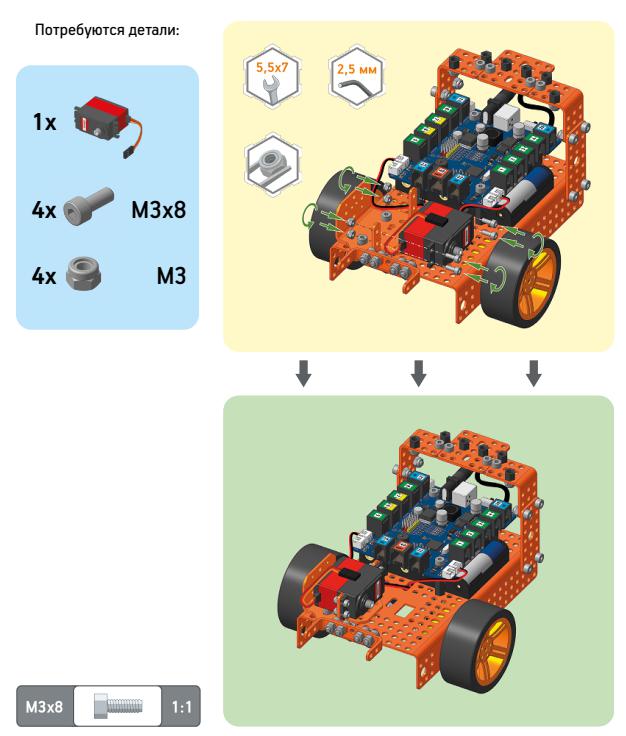
3.2 Крепление серводвигателя к кронштейну
3.3 Установка ступицы на вал серводвигателя

4. Сборка и установка на шасси толкателя мяча
4.1 Сборка получастей толкателя

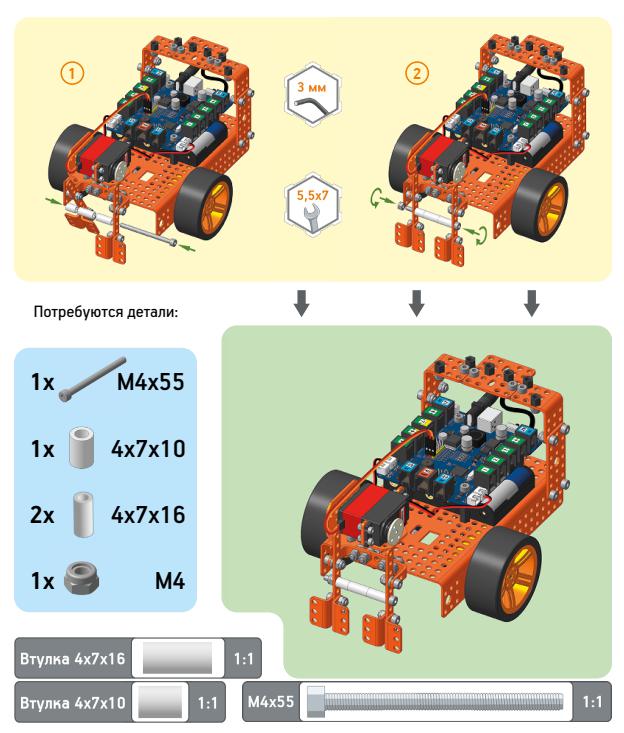
4.2 Шарнирное соединение полутолкателей с основанием на раме
4.3 Соединение получастей толкателя между собой
4.4 Сборка шарнирной тяги для толкателя

4.5 Соединение тяги с толкателем
4.6 Соединение тяги с серводвигателем
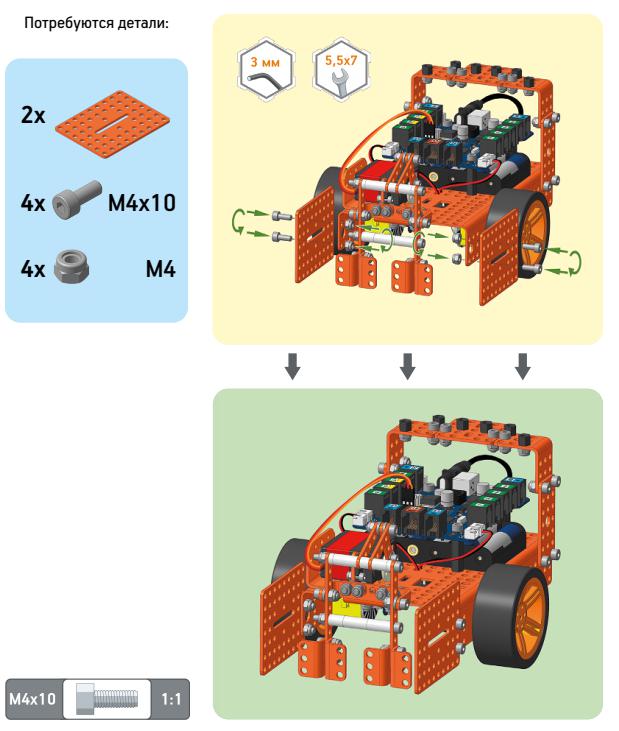
5. Монтаж боковых удерживателей мяча
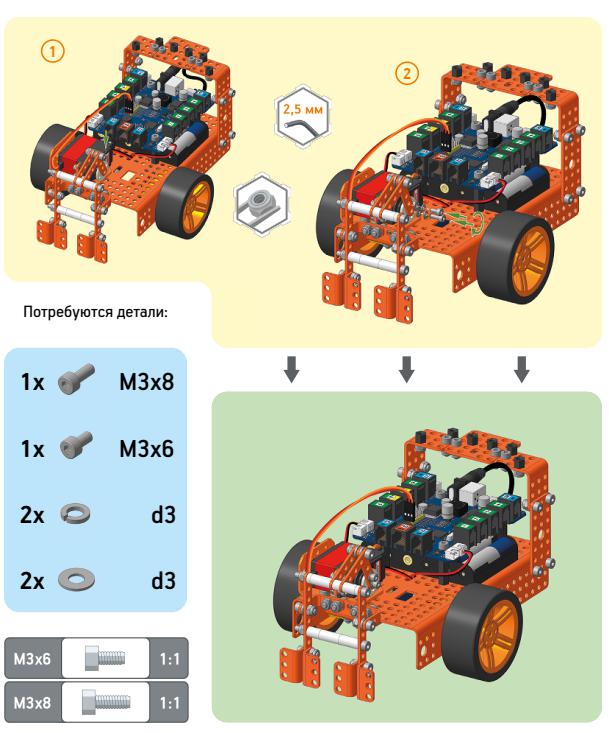
6. Установка электронных модулей индикаторов и ИК-приемника
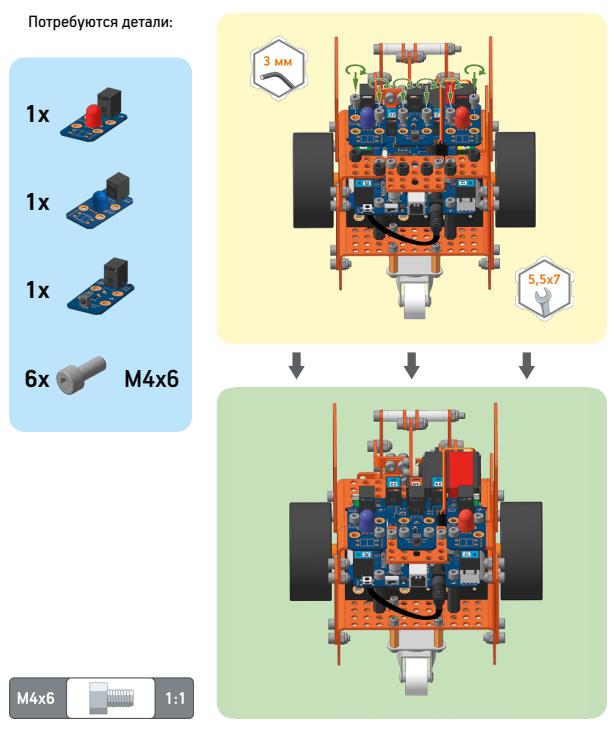
7. Подключение электронных модулей и загрузка программы в контроллер
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
Установите робота на подходящей площадке (идеальным вариантом будет ковровое покрытие, чтобы мяч сильно не катался) и включите его. Поместите на площадку мяч из конструктора и обозначьте границы ворот флажками. После чего попробуйте погонять мяч по полю и забить его в ворота.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: