


Проект №16 «Жмурки»

Вот еще одна игра, теперь уже древнерусская. Суть ее очень проста. Одному из игроков, который является Водой (от слова «водить», вести игру) завязывается платок на голове так, чтобы он закрывал глаза. В результате игрок ничего не видит, то есть находится в зажмуренном состоянии (отсюда и название игры). И вот так, наощупь, он должен ловить других игроков, опираясь только на свой слух. Если ему удается кого-то поймать, то водой уже становится пойманный игрок.
Описанная идея также интересна в плане технической реализации на базе мобильной робототехники. У робота пока нету настоящих глаз и он не может полноценно видеть, как Вода в жмурках. Но он может перемещаться в различных направлениях, а нащупать кого-либо могут помочь различные датчики. Одним из их примеров является ультразвуковой датчик расстояния.


Конструкция
Что ж, для того, чтобы робот видел вокруг себя предметы независимо от наличия или отсутствия света, как хочет Витя, он должен использовать неоптический датчик.Например, это может быть датчик, работающий на основе принципа отраженной звуковой волны.
И, зная скорость распространения звука в воздухе, по времени между излучением и возвратом этой волны можно вычислить расстояние от датчика до объекта. Ну а чтобы этот датчик в не доставлял неудобств, звук должен излучаться в ультразвуковом диапазоне частот, который неслышим для человеческого уха.
Как раз такими свойствами обладает ультразвуковой дальномер, входящий в систему модульной электроники Вертор 2.0. Установим его на мобильное шасси, чтобы робот определял расстояние до окружающих объектов и при игре в жмурки и мог находить вокруг себя игроков. Остальная конструкция останется неизменной.
Алгоритм
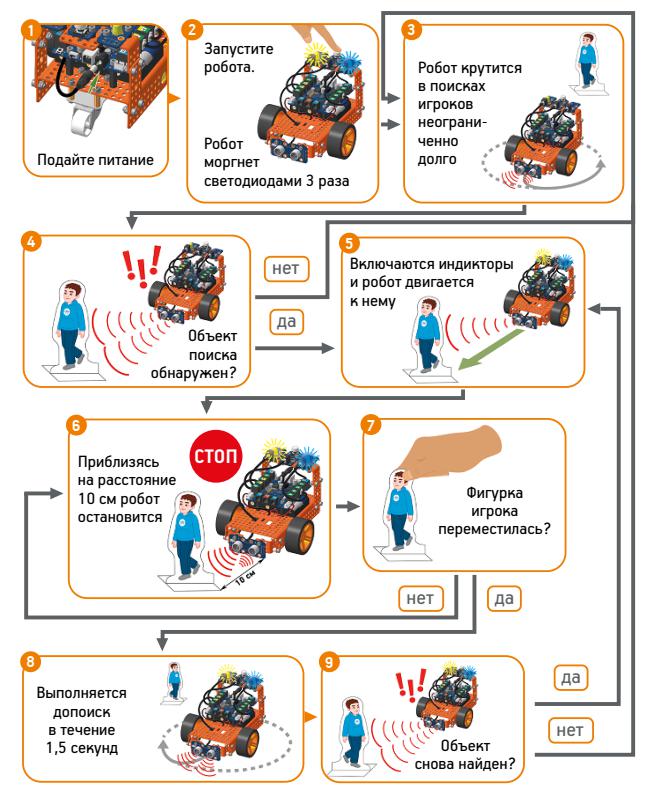
В настоящей игре «жмурки» водящий игрок должен искать и ловить других игроков, опираясь на свой слух и ощущения. Вот и робот должен делать то же самое с помощью, как было решено выше, ультразвукового дальномера.
Поэтому первое, что следует сделать роботу — это «осмотреться» и послушать ситуацию вокруг себя. Другими словами, он должен вращаться на месте вокруг своей оси в попытке обнаружить объекты для поимки.
Полученное с датчика значение расстояния, существенно меньшее, чем все остальные, пришедшие до этого значения (установим рубеж 40 см), будет означать присутствие другого игрока.
Далее робот должен двигаться в сторону объекта, продолжая измерять расстояние до него. По достижении значения расстояния в несколько сантиметров объект можно считать пойманным.
Если обнаруженный объект потом исчезнет из «поля зрения», то процесс поиска должен запускаться автоматически снова — робот опять начнет вращаться в поисках игроков для поимки.
Запускаться и останавливаться игра будет с помощью кнопки запуска/останова.
Сборка
Как, можно сказать, всегда, нам надо снять все лишнее от предыдущего проекта и установить те детали и узлы, которые требуются в проекте текущем. Поэтому потребуется снять кнопку выбора режимов и установить на ее место электронный модуль ультразвукового дальномера.
Цель указанных манипуляций — изучение принципов работы и применения роботов, оснащенных ультразвуковым датчиком расстояния.
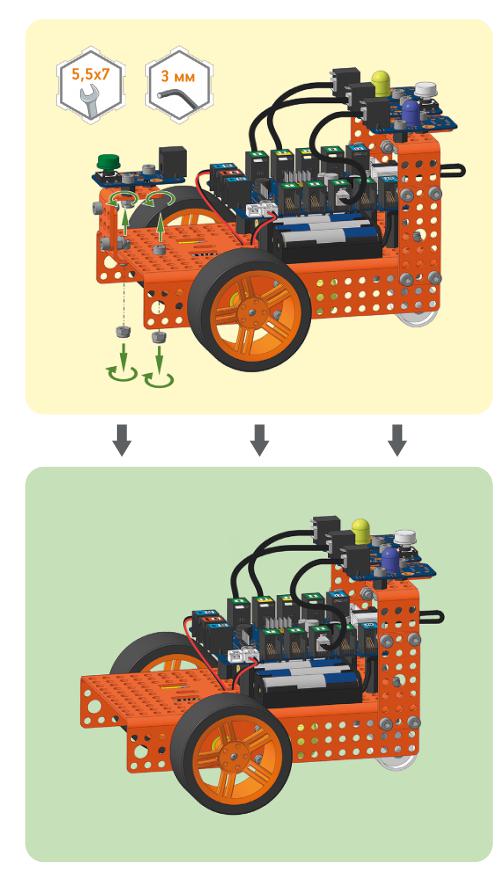
1. Демонтаж конструкции предыдущего проекта
1.1 Отключение кнопки и энкодеров

1.2 Демонтаж кнопки
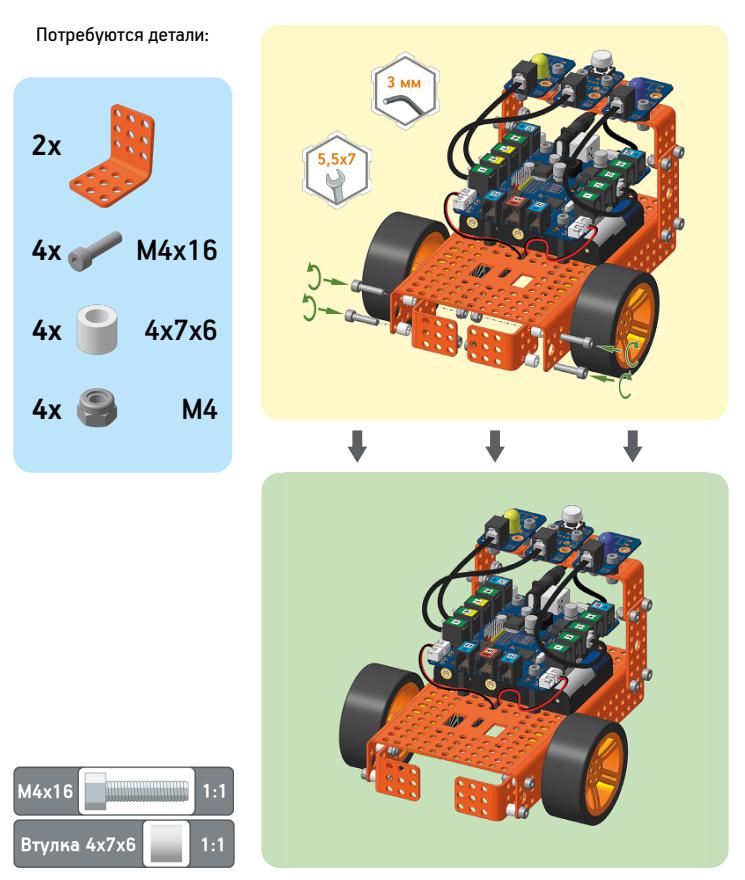
2. Установка модуля ультразвукового дальномера
2.1 Монтаж кронштейнов
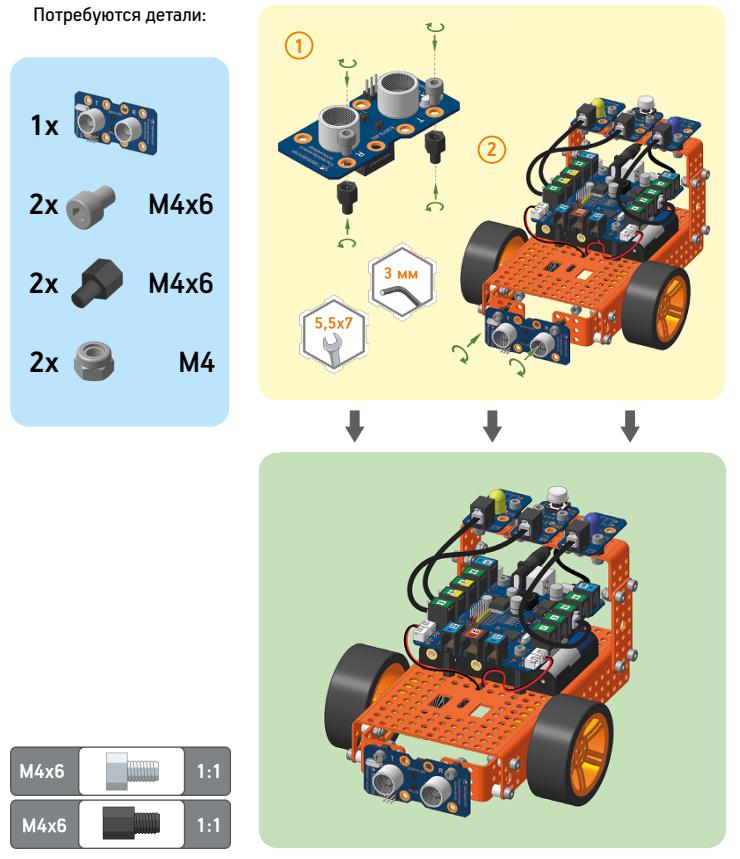
2.2 Подготовка модуля и крепление его к шасси
3. Подключение электронных модулей и загрузка программы в контроллер
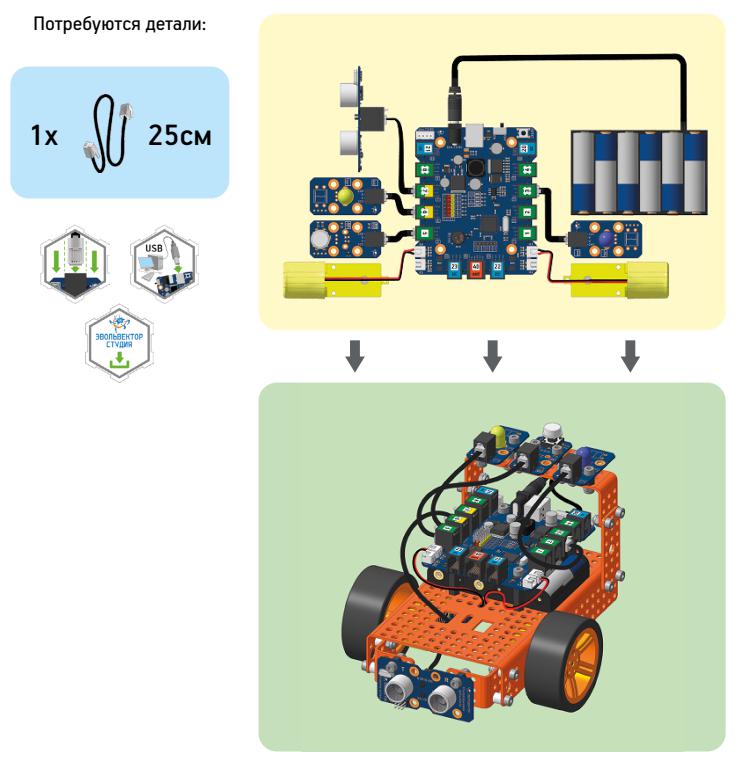
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования Студия Эвольвектор ,
- для среды программирования Arduino IDE.
Проверка робота в работе
Поставьте робота на подходящую по размерам площадку и установите склеенную из картона фигурку Вити не дальше 40 см от робота и запустите его. Робот должен найти ее и двигаться к ней. Попробуйте после этого переместить фигурку в другое место и посмотрите, что в этом случае будет делать робота.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: