


Проект №11 «Уборщик»

Помимо уборки снега есть еще одна очень типовая и очень рутинная работа. Это уборка пыли и песка с тротуаров и с проезжей части улиц.
Особенно актуальна эта задача весной после таяния снега. В течение холодного времени года применяются реагенты и песок, как средства противоскольжения для автомобилей и пешеходов. Все это накапливается в снегу, укрывается новыми слоями снега в течение зимы. После окончания холодного времени года вся эта накопленная грязь, что называется, выходит на поверхность. Во избежания разнесения ее ветром очень желательно все это подметать и убирать.
И как нельзя лучше для решения данной задачи подходят автоматические уборщики.

Конструкция
Витя думает повторить конструкцию стандартной уборочной машины. Если вы хоть раз встречали такую, ездящую по тротуарам и подметающую его, то могли видеть, что она оснащена щетками или одной щеткой. Значит то же самое сделаем и мы. Повесим на шасси щетку и, дабы сделать ее активной, прикрутим к ней еще один мотор-редуктор в качестве привода.
Выходит, что для преобразования снегуборщика в просто уборщика, надо демонтировать отвал, чтобы он не мешался, и установить щетку с приводом, управлять которым будет контроллер согласно заданной программе.
Также, как и в случае со снегоуборщиком, возникает вопрос с навигацией. Здесь, чтобы упростить моделирование задачи, можно принять, что робот подметает пешеходную дорожку. А в качестве нее вполне может выступить линия трассы из конструктора.
В результате робот должен двигаться вдоль данной линии и, вращая щеткой, подметать поверхность, по которой выполняет движение. Для такого следования вдоль линии потребуется уже два датчика линии.
Алгоритм
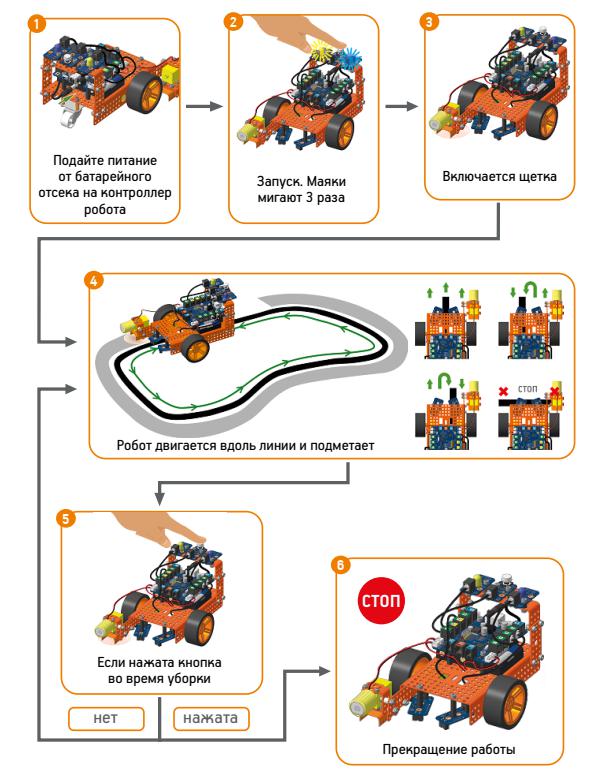
Для запуска робота его необходимо установить на трассу таким образом, чтобы черная линии оказалась между датчиками. После чего необходимо нажать на кнопку запуска для начала работы модели.
Пусть после нажимания кнопки, как всегда, три раза моргнут индикаторы, которые укажут на то, что робот зарегистрировал нажатие кнопки, и что он начнет сейчас движение. Затем робот должен включить щетку и начать движение вдоль линии. Двигаться он будет до тех пор, пока не будет снова нажата кнопка запуска, которая в данном случае уже будет выполнять функцию кнопки останова.
Что касается движения по линии, то оно осуществляется путем попеременного включения-выключения моторов на основе текущих показаний с датчиков линии. А тут возможны несколько вариантов:
- если под обоими датчиками белый цвет, значит линия ровно между датчиками и роботу необходимо двигаться прямо, для чего оба мотора включаются вперед;
- под левым датчиком белый, а под правым черный цвета — тогда робота надо повернуть направо, чтобы он съехал с линии (вал левого мотора вращается вперед, а правого - назад);
- под левым датчиком черный, а под правым белый — тут уже надо поворачивать налево (вал правого мотора вращается вперед, а левого — назад).
Так, анализируя фактическое положение шасси относительно линии и подруливая моторами, контроллер будет направлять робота на линию и двигаться вдоль нее.
Сборка
В рамках сборочных операций по данному проекту необходимо демонтировать обвес, связанный с уборкой снега, и закрепить оборудование, необходимое для подметания дороги.
Главными целями проекта является продолжение изучения механических конструкций и получение навыков работы с двумя датчиками линии.
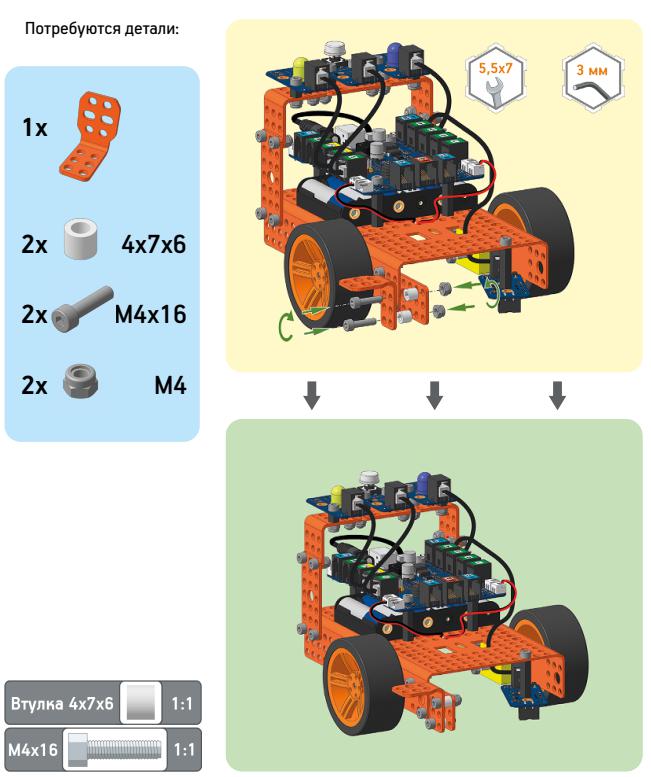
1. Демонтаж конструкции предыдущего проекта
1.1 Отключение серводвигателя и снятие отвала
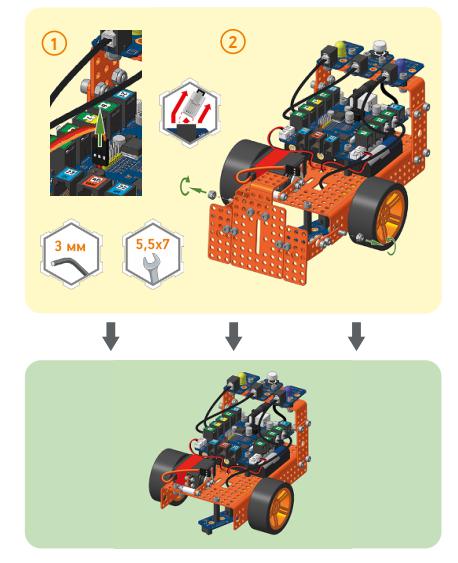
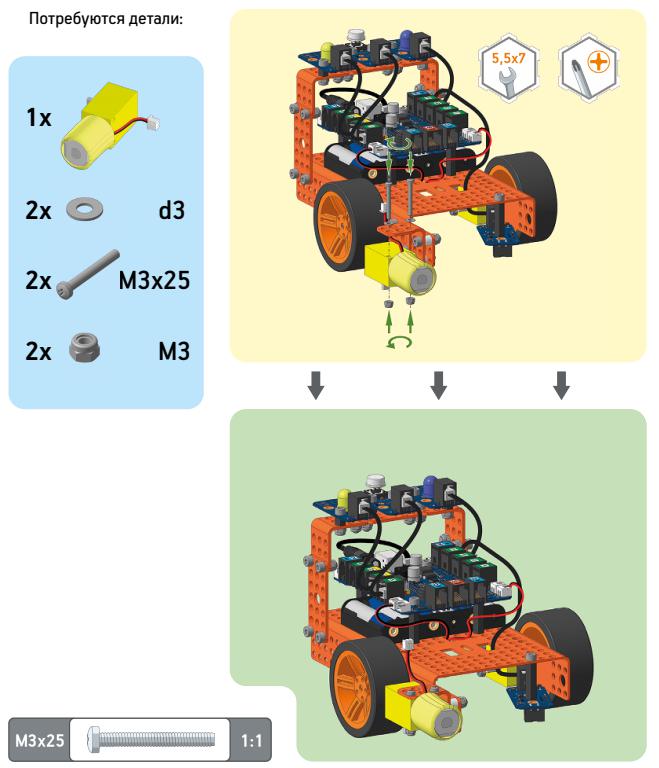
1.2 Демонтаж серводвигателя
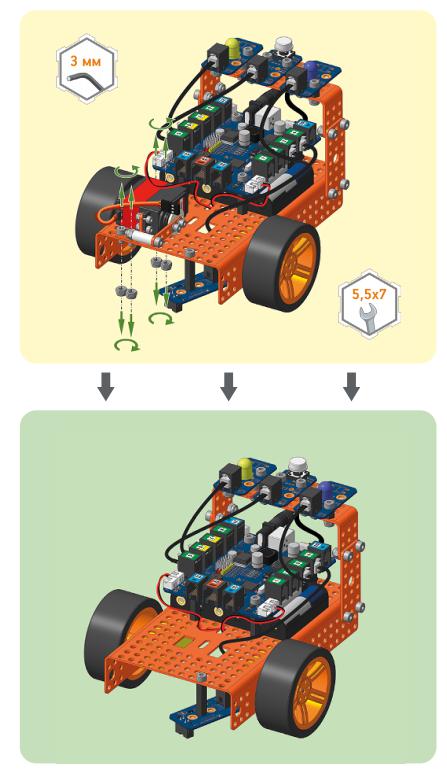
2. Установка привода щетки
2.1 Крепление к корпусу робота держателя привода
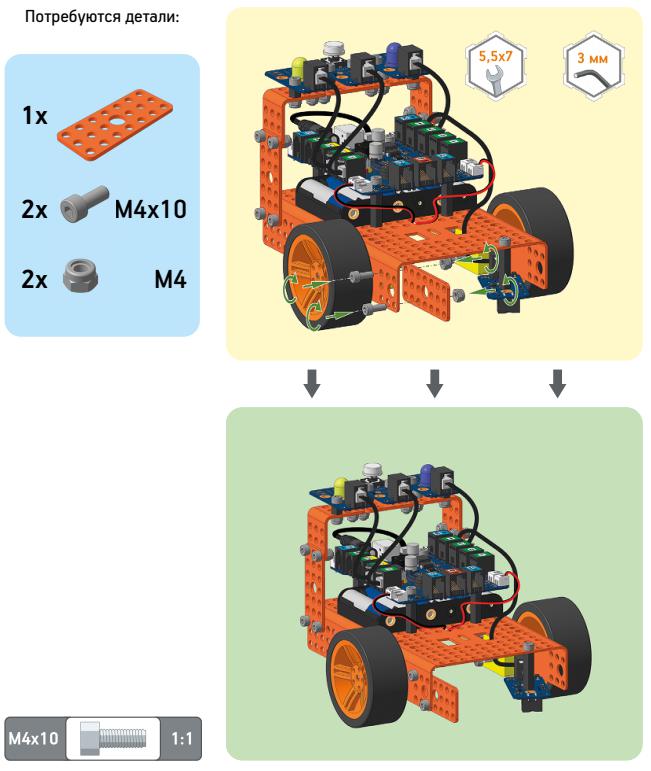
2.2 Крепление к держателю кронштейна привода
2.3 Установка мотор-редуктора на кронштейн
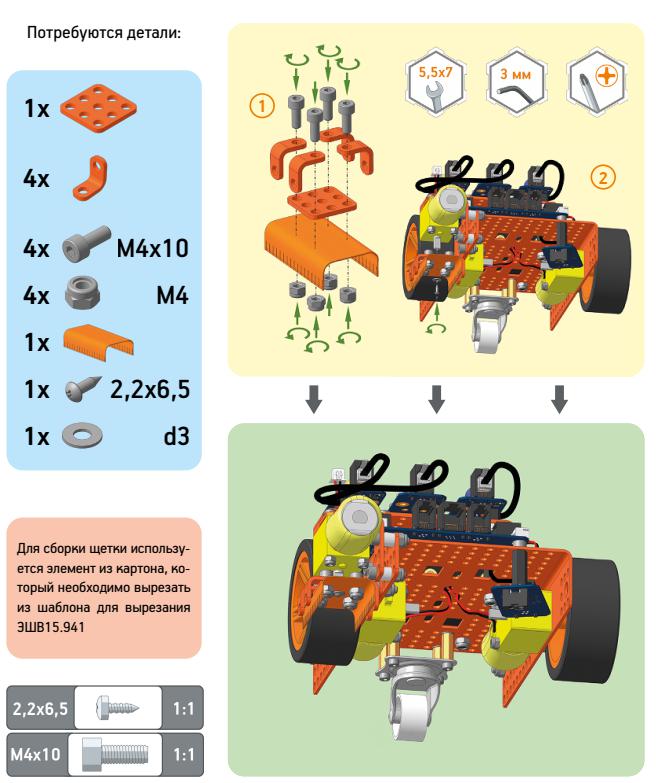
3. Сборка и монтаж щетки
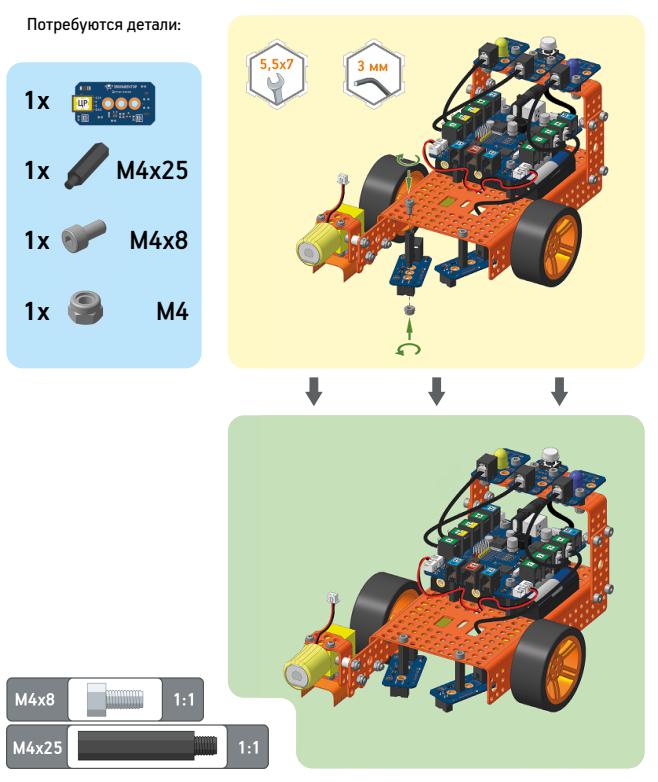
4. Установка второго датчика линии
5. Подключение электронных модулей и загрузка программы в контроллер
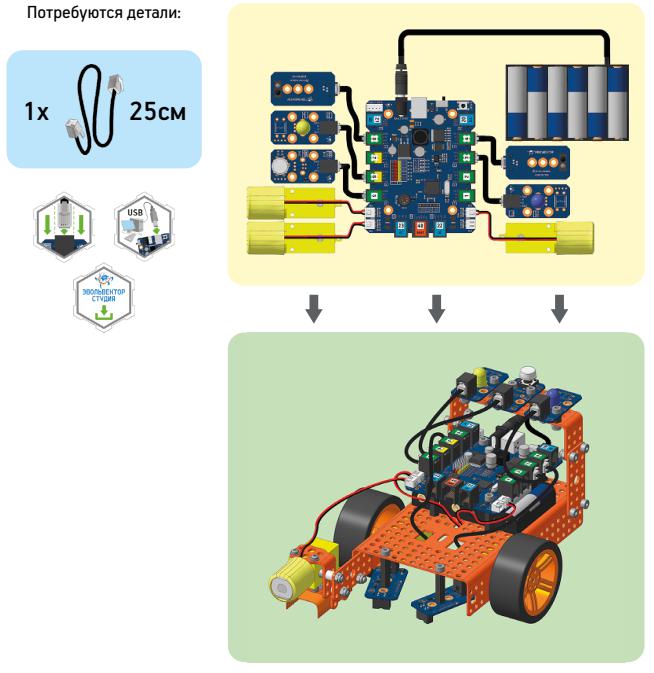
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
Установите робота на черную линию, чтобы она была между датчиками линии. Запустите робота. Оцените работу щетки и робота вцелом.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: