


Электронный модуль "Ультразвуковой дальномер"

1. Назначение устройства
Электронный модуль «Ультразвуковой дальномер» ПЭМ10.485 (Рис. 1.1.) является элементом системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР). Устройство предназначено для определения расстояния до окружающих предметов. Модуль может быть использован в образовательной робототехнике, как элемент навигационной системы.
Модуль не является автономным устройством и рассчитан на применение совместно с программируемыми контроллерами и шилдами, входящими в систему ВЕРТОР (подробная информация о системе представлена на сайте https://academy.evolvector.ru).
Рис. 1.1
2. Конструкция модуля и назначение выводов (контактов)
Ультразвуковой дальномер выполнен в форме печатной платы, на которой смонтированы разъемы для подключения модуля к контроллеру, излучатель и приемник ультразвукового сигнала и иные электронные компоненты, обеспечивающие работу устройства (Рис. 2.1).
Плата имеет крепежные отверстия под винты М3. Межосевые расстояния между отверстиями и габаритные размеры модуля представлены на рис. 2.2. По расстоянию между крепежными отверстиями (кратно 16 мм) модуль совместим с конструкторами Эвольвектор, LEGO, MakeBlock, и может крепиться к их деталям с помощью стоек.
На плате предусмотрены два разъема XH-2.54-4P для подключения модуля к контроллеру. Один по стандартной схеме через контакты TRIG и ECHO, а другой — через протокол передачи данных I2C.
Выводы первого разъема имеют следующее назначение:
VCC - к “+” источника питания контроллера;
ECHO - к цифровому выводу контроллера (по этой линии поступит сообщение для управляющего устройства о возвращении ультразвуковой волны);
TRIG - к цифровому выводу контроллера (линия для генерации ультразвуковой волны на излучателе);
GND - земля (общий провод).
У второго разъема:
VCC - к “+” источника питания контроллера;
SCL - линия для тактирования передачи данных по протоколу I2C;
SDA – линия, по которой непосредственно передаются тактируемые данные по протоколу I2C;
GND - земля (общий провод).
Для указанных контактов на печатной плате модуля нанесена соответствующая маркировка белого цвета.
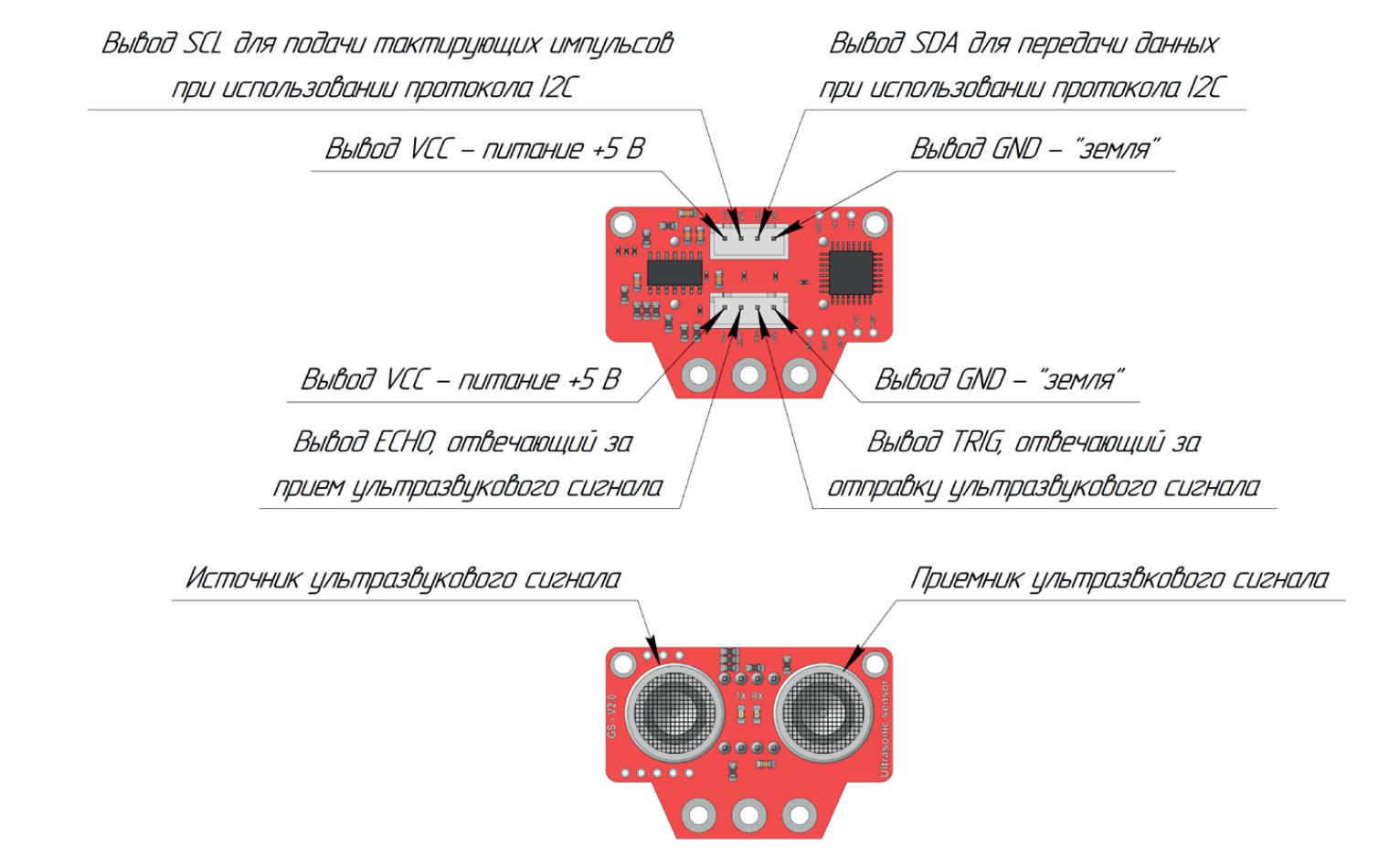
Рис. 2.1

Рис. 2.2
3. Принцип работы
Принцип действия ультразвукового дальномера основан на свойстве звуковой волны отражаться от различных предметов. У электронного модуля в качестве такой волны выступает звук, имеющий частоту около 40 кГц, т. е. ультразвук. Звук с частотой более 20 кГц не слышен для человеческого уха, но обладает темиже свойствами, что и звук слышимых частот. Скорость его распространения в воздухе при нормальных условиях приблизительно равна 343 м/с.
На рисунке 3.1 изображен принцип работы ультразвукового дальномера. При подаче импульса с вывода микроконтроллера на линию TRIG излучатель (высокочастотный динамик) формирует ультразвуковуюволну, распространяющуюся в пространстве до тех пор, пока на ее пути не возникнет препятствие (стена, дерево или объемный предмет на полу). От него волна отражается и движется в обратном направлении, попадая на приемник ультразвуковых волн (чувствительный микрофон). Как только приемник зафиксирует наличие ультразвуковой волны, на выводе модуля ECHO появляется напряжение, соответствующее напряжению логической «1». Контроллером вычисляется время, которое прошло с момента генерации ультразвуковой волны до ее приема. Очевидно, что за это время волна проходит расстояние, равное двум расстояниям до препятствия.
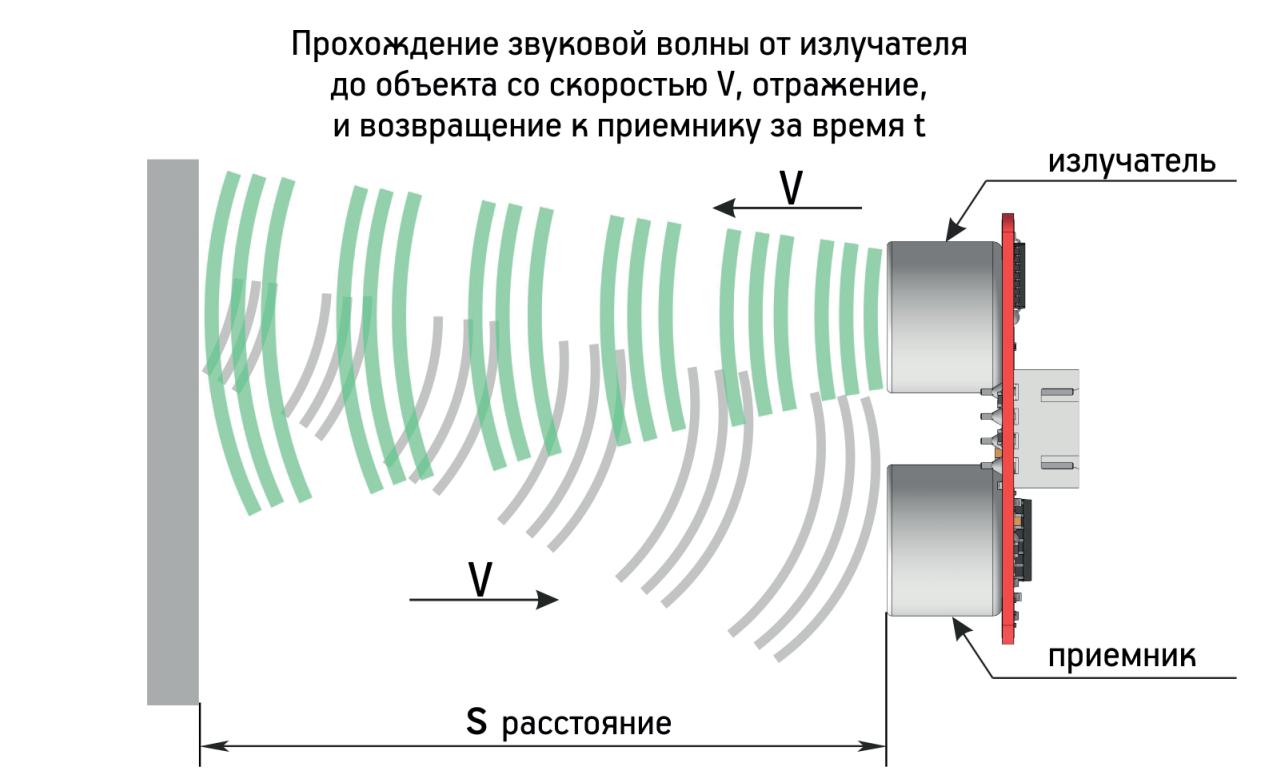
Рис. 3.1
На основании значения скорости звука в воздухе, и измеренного времени прохождения волны до препятствия и обратно, пройденное расстояние (т. е. Расстояние до объекта) вычисляется по формуле:

Для того, чтобы не программировать каждый раз при создании нового проекта указанные вычисления, для среды Arduino IDE предусмотрены библиотеки по работе с ультразвуковым дальномером.
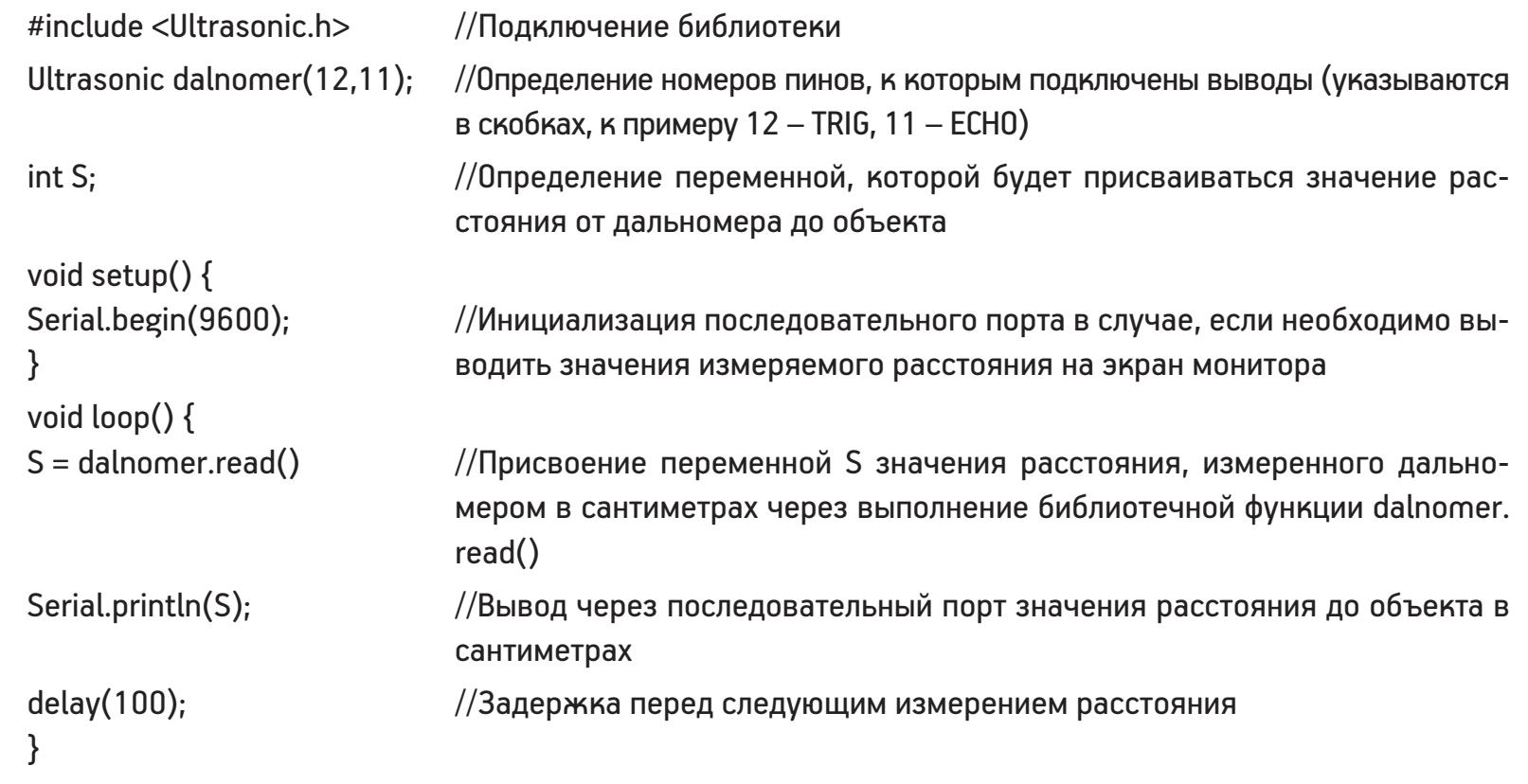
Если модуль подключается к контроллеру через разъем с контактами TRIG и ECHO, то для используется стандартная библиотека Ultrasonic-3.0.0 (скачать ее можно с сайта Академии Эвольвектор).
Ниже приведены команды, используемые при работе с указанной библиотекой:
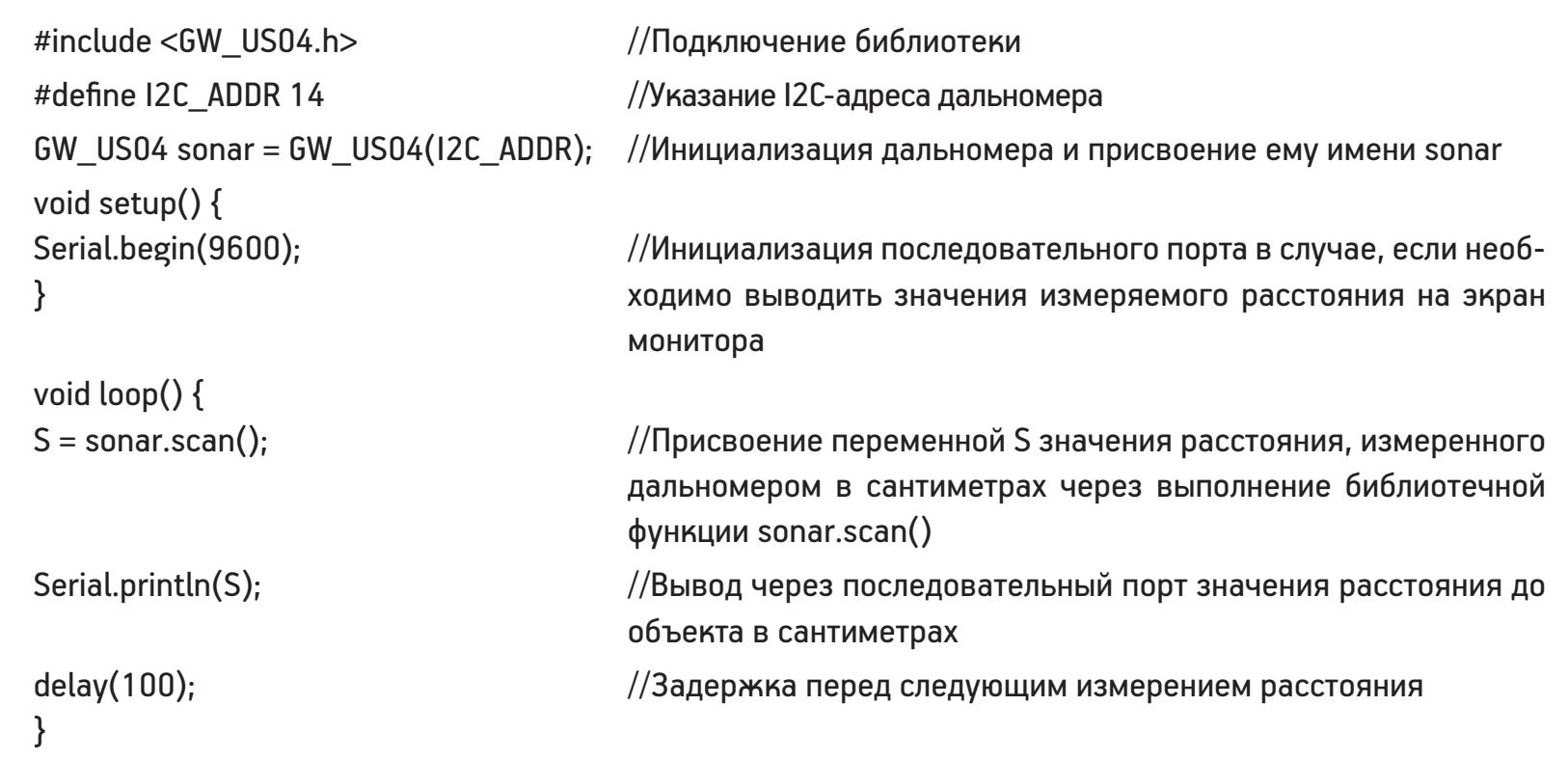
Если датчик подключается к контроллеру через разъем I2C, то алгоритм работы с модулем становится другим. В этом случае все вычисления производит микросхема микроконтроллера, смонтированная на плате дальномера. А с помощью сигнальных контактов осуществляется только передача данных об измеренном расстоянии. Для реализации такого режима работы требуется уже другая библиотека под названием GW_US04-master (скачать ее можно с сайта Академии Эвольвектор).
Ниже приведны команды, используемые при работе с указанной библиотекой:
4. Технические характеристики
| Наименование характеристики | Значение |
| Типоразмер | 1U |
| Тип разъема | XH-2.54-4P |
| Номинальное напряжение питания, В | 5 |
| Диапозон измеремого расстояния | До 400 см |
| Возмоэжность обмена информацией по интерфейсу I2C | да |
5. Условия гарантии
ООО «Эвольвектор» гарантирует работоспособность электронного модуля на протяжении всего гарантийного срока эксплуатации, который составляет 12 месяцев с момента приобретения устройства. Также гарантируется совместимость модуля с другими устройствами системы управляющей электроники ВЕРТОР. Гарантийные обязательства производителя распространяются только на ту продукцию, которая не имеет повреждений и не выведена из строя в результате неверных действий пользователя.
По вопросам гарантийного обслуживания, а также по всем техническим и информационным вопросам можно обращаться на электронную почту
info@evolvector.ru,
help@evolvector.ru,
а также по телефону +7 (499) 391-01-05.
Адрес для корреспонденции: 143300, Московская область, г. Наро-Фоминск, ул. Московская, д.15.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: