


Программируемый контроллер Вертор СТАНДАРТ V1.2

1. Назначение устройства
Программируемый контроллер ВЕРТОР СТАНДАРТ ПЭМ10.3158 (Рис.1.1) является одним из ключевых элементов системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР). Он предназначен для создания системуправления различного назначения в рамках основного и дополнительного школьного образования. Рассчитан на применение совместно с электронными модулями, входящими в систему ВЕРТОР (подробная информация о системе представлена в соответствующем разделе сайте https://academy.evolvector.ru).
Контроллер может использоваться для создания системы управления учебными автоматическими и робототехническими моделями или электронными устройствами. В рамках стандартных функциональных возможностей контроллер может принимать сигналы от входящих в систему датчиков, обрабатывать их и формировать управляющие сигналы для исполнительных устройств согласно заложенной программе.
Рис 1.1
2. Конструкция модуля и назначение выводов (контактов)
Контроллер выполнен в виде печатной платы, которая оснащена следующими элементами (Рис. 2.1):
- разъемами типа XH-2.54-4P для подключения совместимых электронных модулей;
- разъемами питания под штекер размером 5,0х2,1 и для подачи электроэнергии от заряжаемого модуля;
- клеммниками для подсоединения электрических двигателей, соответствующих требованиям номинального напряжения и мощности;
- штыревыми контактами для подключения стандартных RC серводвигателей;
- разъемом для подключения одноплатного компьютера Raspberry Pi;
- разъемом для подключения устройств, работающих по последовательному протоколу UART;
- регулятором напряжения для питания электродвигателей и сервоприводов;
- разъемом USB тип В для подключения контроллера к персональному компьютеру и загрузки в него программ управления (скетчей);
- тактовыми кнопками, для которых можно назначить пользовательские функции при реализации проектов и тем самым обойтись без подключения внешних тактовых кнопок;
- выключателем питания для клеммников электродвигателей и контактов сервоприводов;
- кнопкой принудительной перезагрузки контроллера в случае его сбоя или некорректной работы.
Перечисленные элементы представлены на рисунке 2.1.
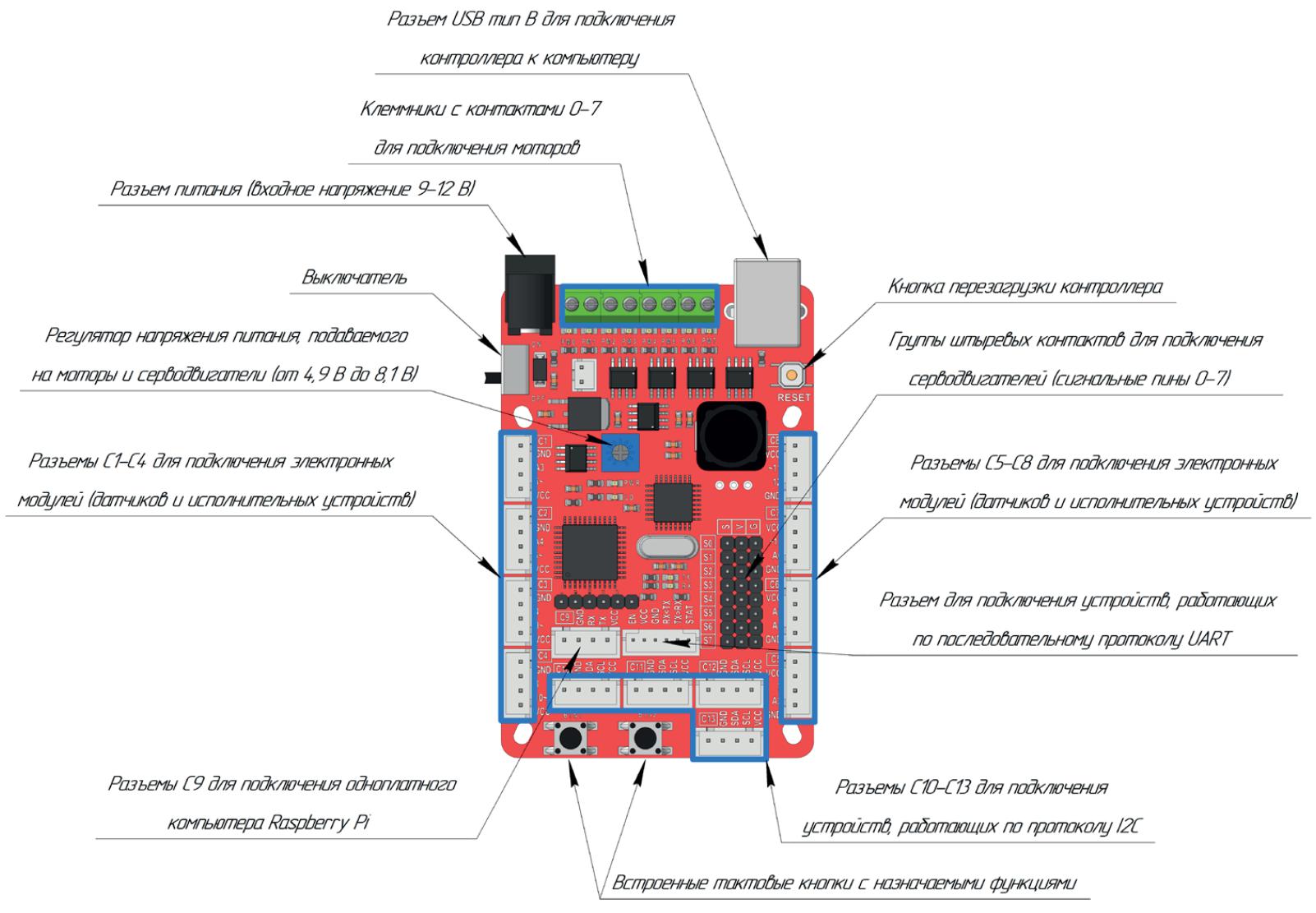
Рис. 2.1
На рисунке 2.2 представлен внешний вид контроллера с указанием габаритных размеров, а также расположение и размеры крепежных отверстий. Расположение и форма крепежных отверстий на плате контроллера совместимы с таковыми на одноплатном компьютере Raspberry Pi, что дает возможность крепить эти устройства с помощью стоек одно над другим. Помимо этого, по расстоянию между крепежными отверстиями (кратно 16 мм) контроллер совместим с конструкторами Эвольвектор, LEGO, MakeBlock и может прикручиваться к их деталям с помощью стоек. Смонтированные на контроллере четырехконтактные разъемы типа XH-2.54-4P промаркированы и имеют разные возможности по подключению к ним периферийных устройств (электронных модулей). Общей чертой всех разъемов является наличие выводов питания (VCC) и «земли» (GND), которые расположены по краям разъема. В части же сигнальных контактов, размещенных в центре разъема, существуют отличия. Разъемы С1-С8 являются разъемами общего назначения и размещены в два ряда по бокам платы контроллера. У части из них (разъемы С1, С2, С5, C6 и С7) присутствует один цифровой (промаркирован просто числовым номером) и один аналоговый (промаркирован буквой А с номером) контакты. К таким возможно подключение датчиков, выдающих аналоговый сигнал. Несколько разъемов (С3, С4, С8) имеют исключительно цифровые управляющие контакты, поэтому могут работать только с цифровыми датчиками.
Группа разъемов С10-С13 предназначена для подключения устройств, работающих по протоколу передачи данных I2C.
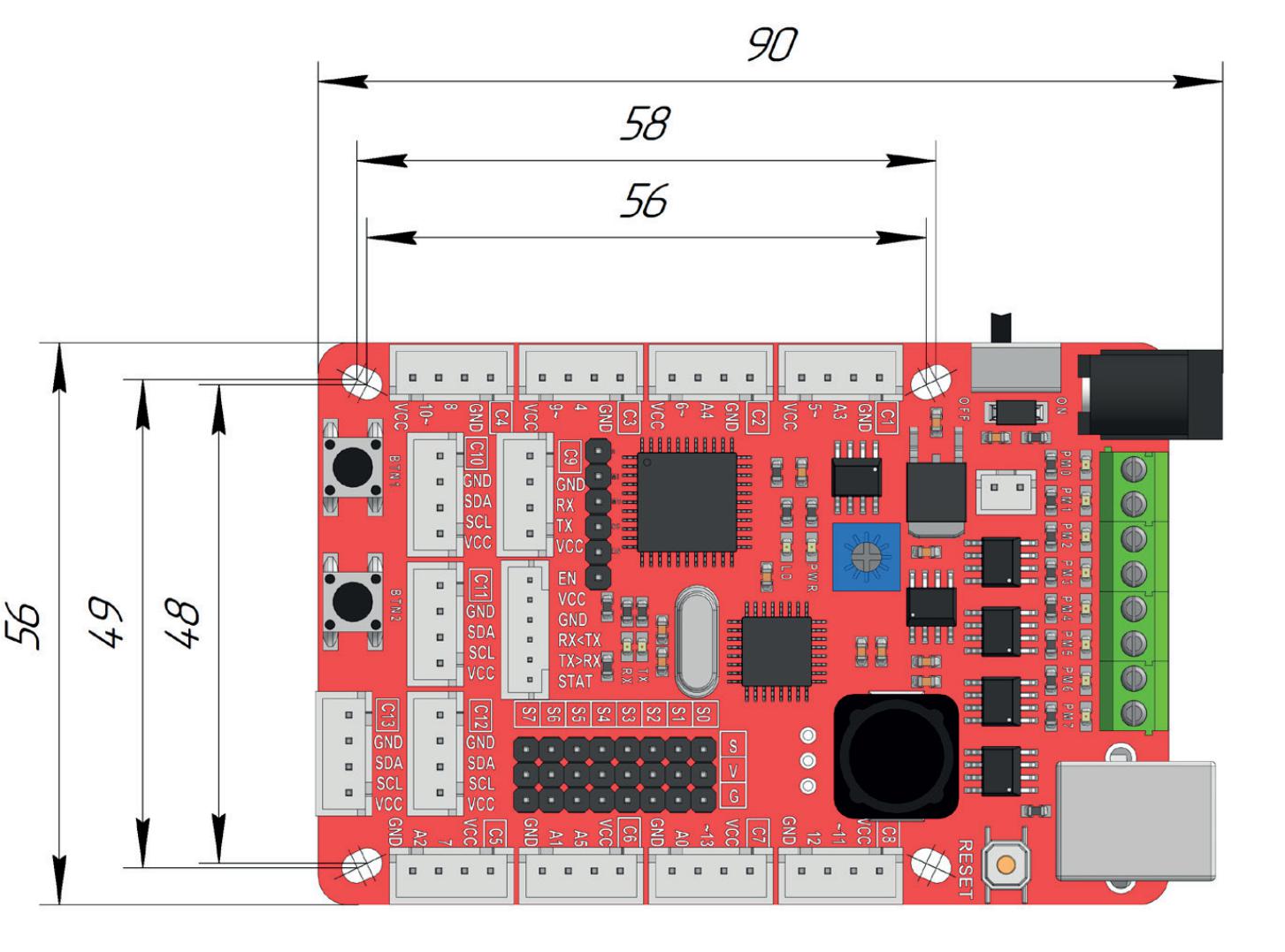
Рис 2.2
Разъем С9 необходим для обеспечения обмена данными с одноплатным компьютером Raspberry по последовательному интерфейсу UART.
Цифровые контакты, перед номером которых стоит знак тильда («~»), поддерживают широтно-импульсную модуляцию, то есть на них может быть сформирован псевдо аналоговый сигнал.
3. Принцип работы контроллера
Контроллер ВЕРТОР СТАНДАРТ построен на основе платформы Arduino Leonardo. Он представляет собой плату с контактами для подключения различных внешних устройств. Контакты сгруппированы в разъемы в виде гнезд, в каждом из которых по 4 контакта: питание, «земля», и 2 контакта для приема или передачи сигналов. Через указанные контакты принимаются сигналы от датчиков и формируются управляющие сигналы для исполнительных устройств.
Наличие четырехконтактных разъемов является преимуществом по сравнению со стандартной платой Arduino Leonardo, которая оснащена колодками с отдельными контактами. Оно выражается в том, что модули могут надежно закрепляться с помощью стоек и винтов на элементах конструкций роботов или любого другого устройства, совместимого по крепежным отверстиям. Также разъемы позволяют более удобно подключать датчики и исполнительные устройства, т.к. для подключения не требуется макетная плата.
Еще одной особенностью контроллера ВЕРТОР СТАНДАРТ является поддержка заметно большего количества одновременно подключаемых устройств по сравнению с классическими платами Arduino Leonardo.
Это возможно благодаря встроенному микроконтроллеру STM8S003, выполняющего роль расширителя портов. В результате обеспечивается возможность подключения сразу 14-ти электронных модулей системы электроники ВЕРТОР, 8-ми серводвигателей небольшой мощности (контакты имеют маркировку S0-S7) и 4-х обычных коллекторных моторов (контакты промаркированы РМ0-РМ7).
Для организации питания перечисленных моторов и серводвигателей в контроллере предусмотрен преобразователь напряжения, допускающий суммарный ток потребления подключенными моторами до 2,5 А.
То, как принимаются входные сигналы, обрабатываются и генерируются управляющие сигналы, определяется программой (скетчем), загруженной в контроллер. Для загрузки программы необходим только персональный компьютер с разъемом USB и с установленным на него программным обеспечением Arduino IDE. Дополнительные программаторы для программирования контроллера не требуются. С инструкцией по подключению контроллера к компьютеру можно ознакомиться в соответствующем разделе сайта Академии Эвольвектор.
Полный функционал контроллера по управлению двигателями и электронными модулями реализуется с помощью следующего набора библиотек:
Board
DualWheelTruck
I2CTransport
PCA9685
Servo
SmoothServo
STM8_I2C
STM8_I2C_standart
TimerOne
Tweak
Для возможности использования в скетчах их необходимо скачать и поместить в папку libraries, находящуюся в директории с установленной средой программирования Arduino IDE. Если в процессе перемещения библиотек в указанную папку будет выдано предупреждение, содержащее сообщение о том, что такие файлы и папки уже содержатся по указанному пути, то необходимо выполнить их замену.
После размещения библиотек легко проверить корректность их установки. Для этого следует выполнить запуск Arduino IDE, нажать левой кнопкой мыши по пункту «Скетч», после чего выбрать пункт меню «Подключить библиотеку» и если в выпавшем списке содержатся только что загруженные библиотеки (Рис. 3.1), то библиотеки размещены верно.
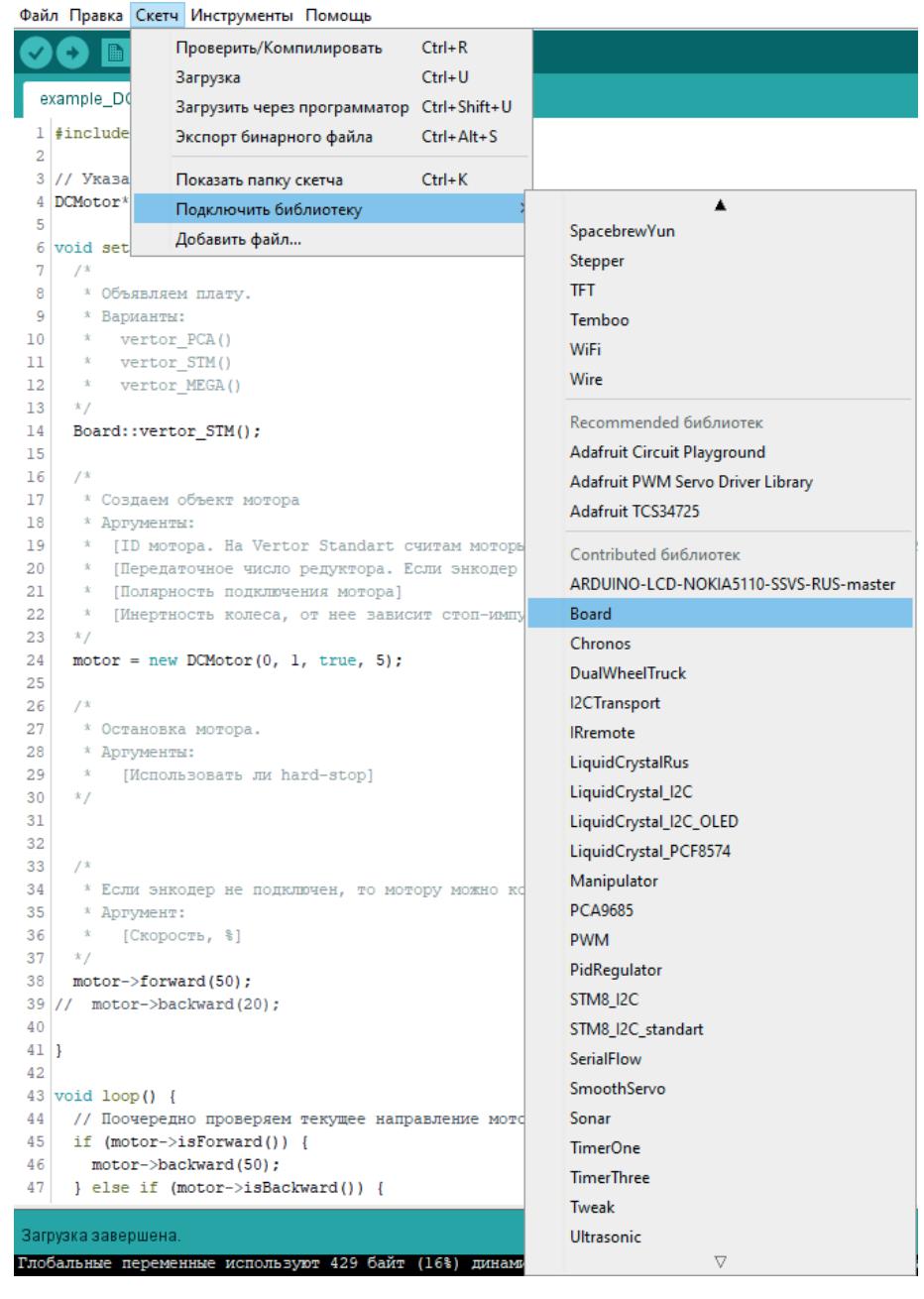
Рис 3.1
Порядок использования указанных библиотек сводится к следующим действиям:
1. В начале скетча производится подключение файлов библиотек.
2. Выполняется инициализация каналов передачи данных и объектов, управление которыми будет осуществляться с помощью библиотек.
3. В «теле» скетча вызываются конкретные библиотечные функции, через которые выполняется управление подключенными к контроллеру двигателями или сервомоторами.
С командами, которые обеспечивают выполнение указанных действий, можно ознакомиться с помощью примера скетча example_DCMotor, находящегося в скачанном архиве в папке Sketches. В этом примере продемонстрировано управление ДПТ.

Для инициализации мотора используется функция new DCMotor (a, b, c, d), где:
a – номер подключенного мотора (если мотор подключен к выводам PM0-PM1, то в качестве этого аргумента необходимо записать 0, если PM2-PM3 – 1, PM4-PM5 – 2, PM6-PM7 – 3 );
b – передаточное число редуктора (если энкодер установлен на выходном валу мотора или не используется в этом проекте, то передаточное число равно 1);
c – полярность подключения двигателя, которая необходима, когда требуется поменять направление вращения вала двигателя без переподключения проводов двигателя к клеммной колодке (принимает значения true или false);
d – число, которое характеризует степень инерционности вращающихся деталей двигателя или колесной модели в целом (принимает значение от 0 до 255).

Для управления мотором используются функции:

Если в проекте необходимо точное позиционирование вала мотора, то необходимо применять энкодер.
Пример работы с мотором, на валу которого установлен энкодер, находится в папке example_DCMotor_with_Encoder.
Частично, процесс инициализации такого мотора и используемые для его управления функции похожи на описанные выше.
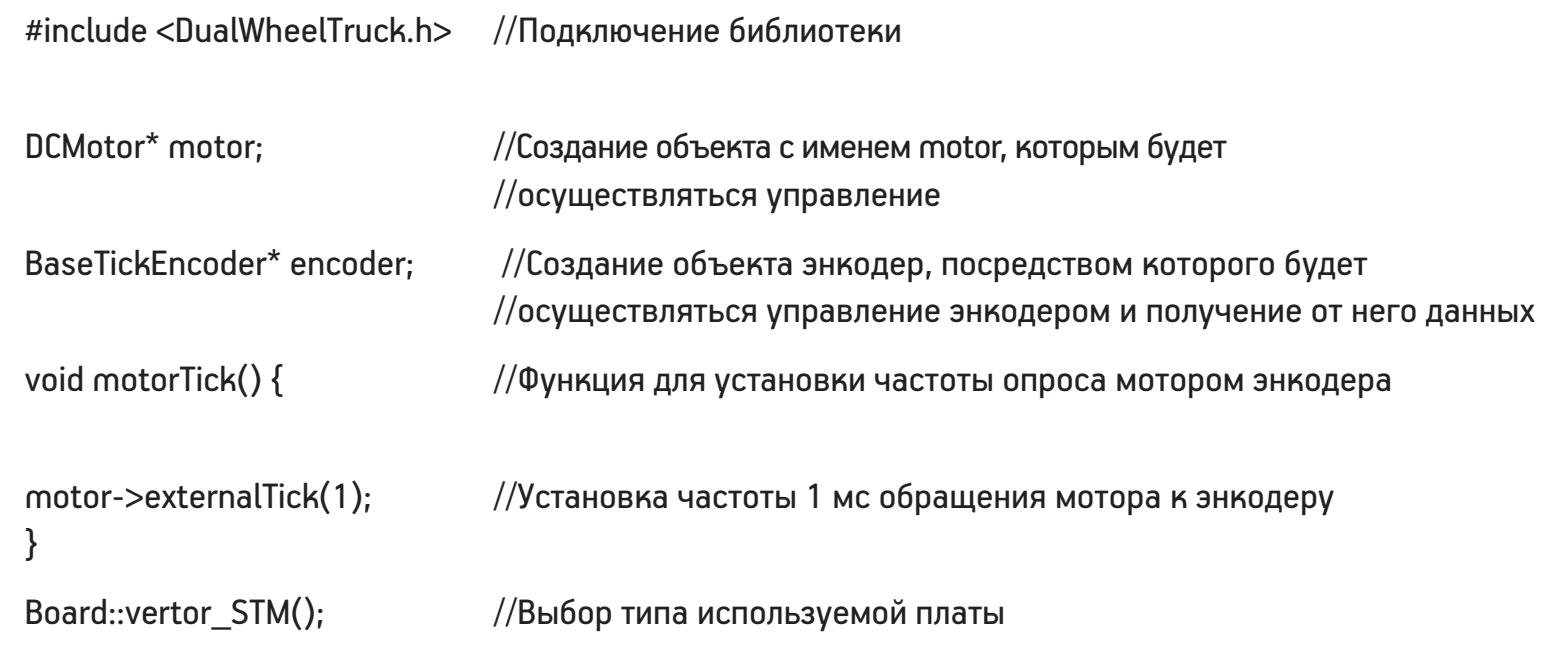
Для инициализации двигателя используется функция new DCMotor(a, b, c, d), назначение аргументов которой точно такое же как в предыдущем примере

Инициализация оптического энкодера производится с помощью функции new OpticalTickEncoder(a, b), где:
a – номер пина контроллера, к которому подключены вывод D0 оптического энкодера;
b – количество секторов на стороне черно белого диска, повернутой к чувствительному элементу опти-
ческого энкодера.

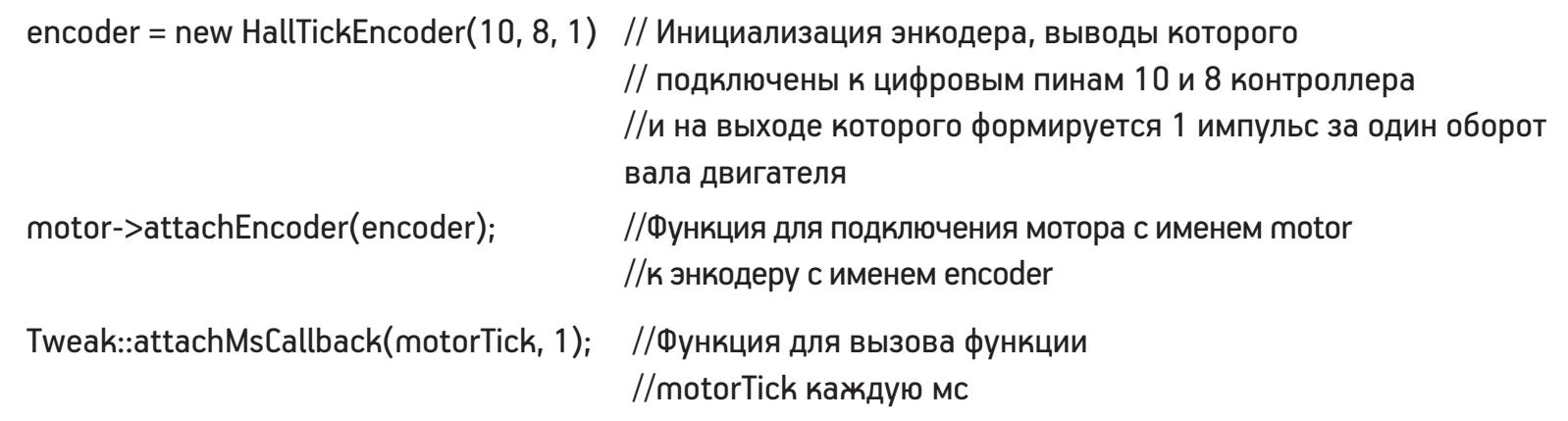
Инициализация магнитного энкодера (датчик Холла) производится с помощью функции new
HallTickEncoder(а, b, c), где:
a – первый номер пина контроллера, к которому подключены вывод магнитного энкодера;
b – второй номер пина контроллера, к которому подключены вывод магнитного энкодера;
с – количество импульсов на выводе энкодера за один оборот вала мотора.
Для управления мотором используются функции:
С использованием данного набора библиотек есть возможность реализовать не только независимое управление подключенными моторами, но и шасси в целом. Типичный вид такого шасси приведен на рисунке 3.2.
Пример рассматриваемой программы находится в папке sketches/truck/DualWheelTruck_STM.
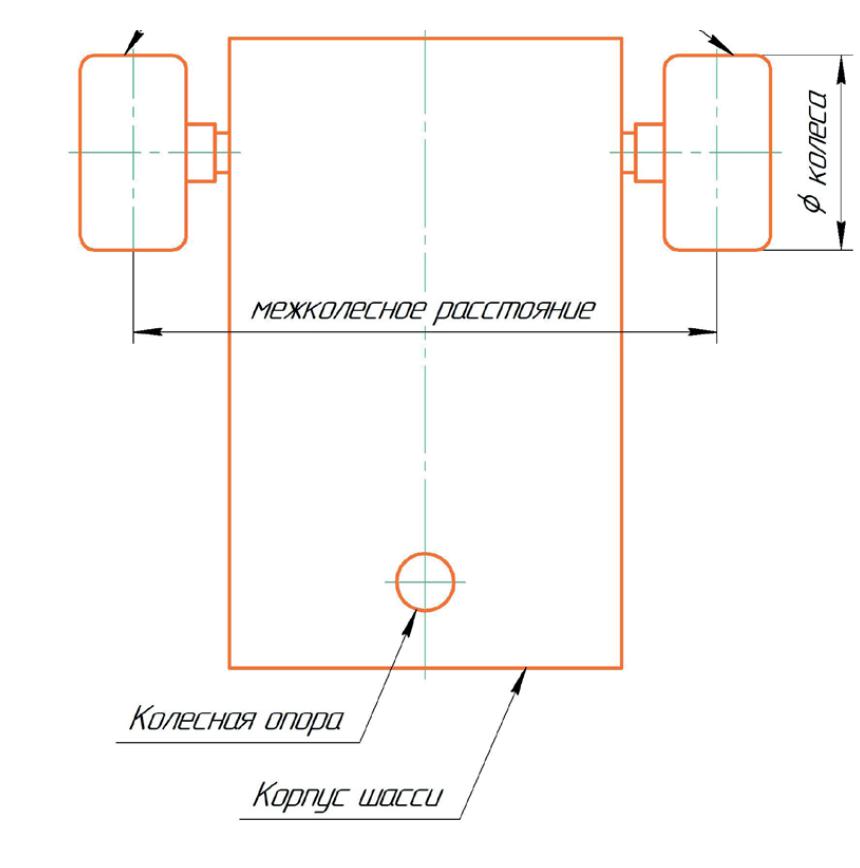
Рис. 3.2
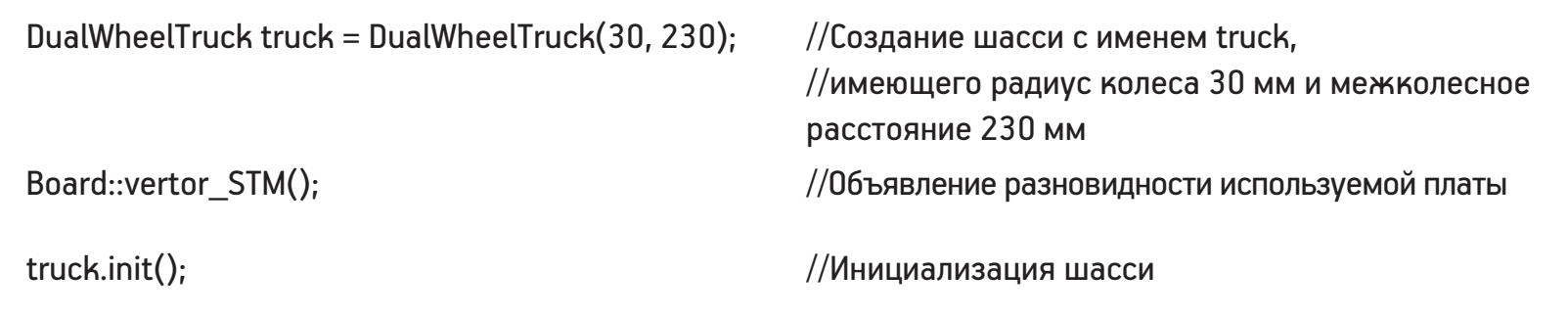
Для создания нового объекта - двухколессного шасси - и его настройки применяется функция DualWheelTruck(a, b), где:
a - радиус колеса (половина диаметра) в мм;
b - расстояние между колесами в мм;
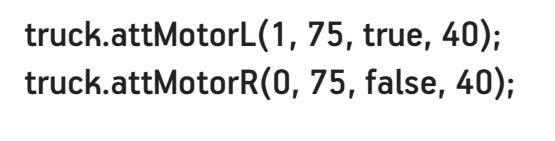
Для настройки левого и правого моторов шасси применяются соответственно функции truck.attMotorL(a, b, c, d) и truck.attMotorR(a, b, c, d), аргументы которых имеют следующее назначение:
a – номер подключенного мотора (если мотор подключен к выводам PM0-PM1, то он в качестве этого аргумента необходимо записать 0, если PM2-PM3 – 1, PM4-PM5 – 2, PM6-PM7 – 3, );
b – передаточное число редуктора (если энкодер установлен на выходном валу мотора или не используется в этом проекте, то передаточное число равно 1);
c – полярность подключения двигателя, которая необходима, когда требуется поменять направление вращения вала двигателя без переподключения проводов двигателя к клеммной колодке (принимает зна-чения true или false);
d – число, которое характеризует степень инерционности вращающихся деталей двигателя или колесной модели в целом (принимает значение от 0 до 255).
Далее осуществляется подключение энкодеров. При инициализации левого и правого оптических энкодеров применяются функции соответственно truck.attOptEncL(a, b) и truck.attOptEncR(a, b), где:
a – номер пина контроллера, к которому подключен вывод D0 оптического энкодера;
b – количество секторов на стороне черно белого диска, повернутой к чувствительному элементу оптического энкодера.
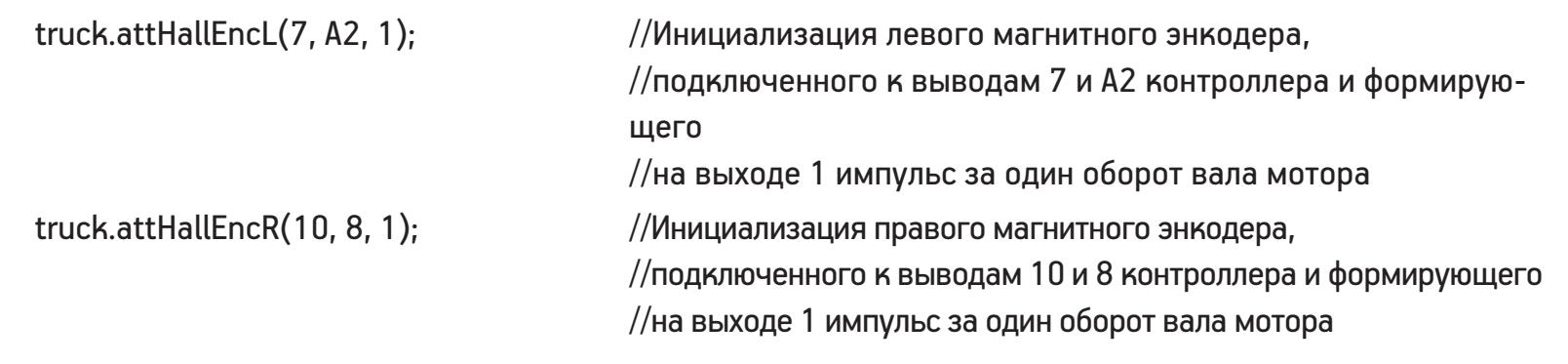
При инициализации левого и правого магнитных энкодеров применяются функции соответственно truck.attHallEncL(a, b, c) и truck.attHallEncR(a, b, c), где:
a – первый номер пина контроллера, к которому подключен вывод магнитного энкодера;
b – второй номер пина контроллера, к которому подключен вывод магнитного энкодера;
с – количество импульсов на выводе энкодера за один оборот вала мотора.
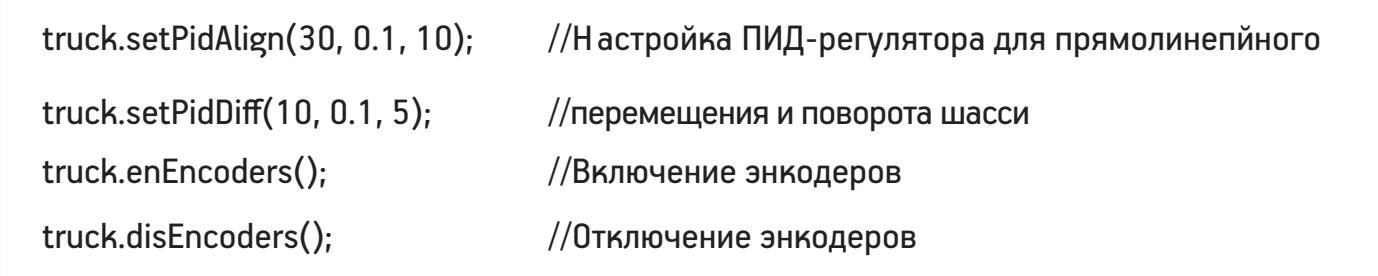
Для регулирования моторов с энкодерами в целях обеспечения более точного прямолинейного движения или поворота шасси в библиотеке применяется пропорционально-интегрально-дифференциальный регулятор. Он требует также инициализации и настройки. Выполняется это с помощью нижеприведенных функций, аргументами которых выступают коэффициенты, влияющие на характер работы регулятора. У них есть базовые значение, относительно которых можно производить более тонкую настройку ПИД-регулятора.
Для прямолинейного движения модели:
![]()
Здесь:
Kp - коэффициент пропорциональной составляющей (базовое значение 30);
Ki - коэффициент интегральной составляющей (базовое значение 0,1);
Kd - коэфф дифференциальной составляющей (базовое значение 10);
Для поворота модели:

Здесь:
Kp - коэф пропорциональной составляющей (базовое значение 10);
Ki - коэф интегральной составляющей (базовое значение 0,1);
Kd - коэф дифференциальной составляющей (базовое значение 5);
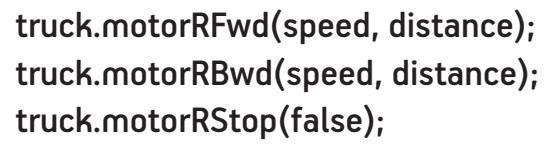
Для управления шасси применяются следующие функции:

Аналогичные команды для правого колеса:
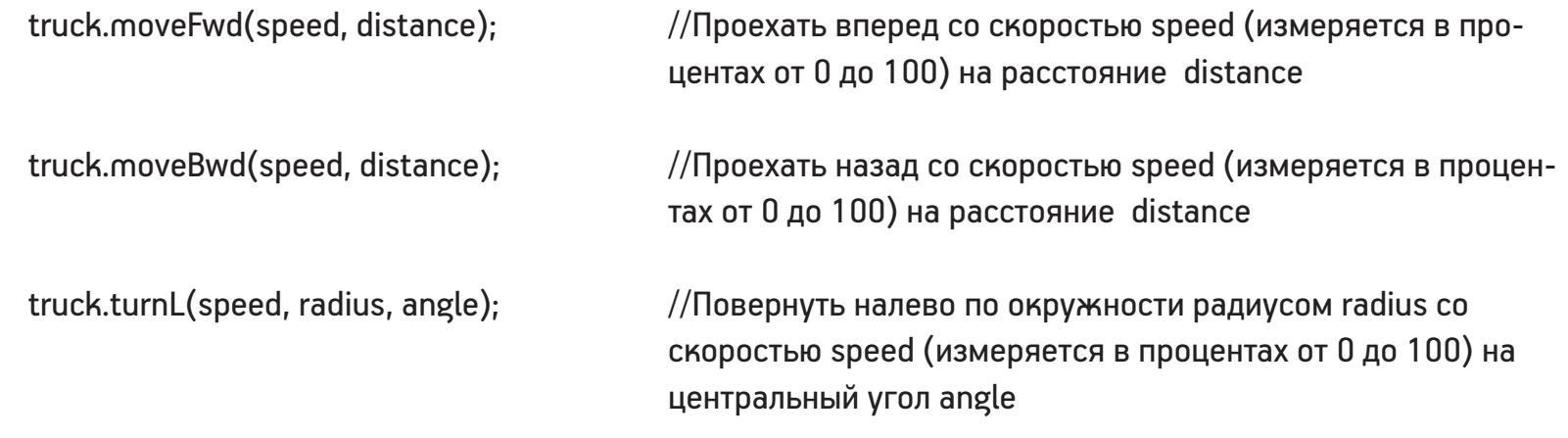
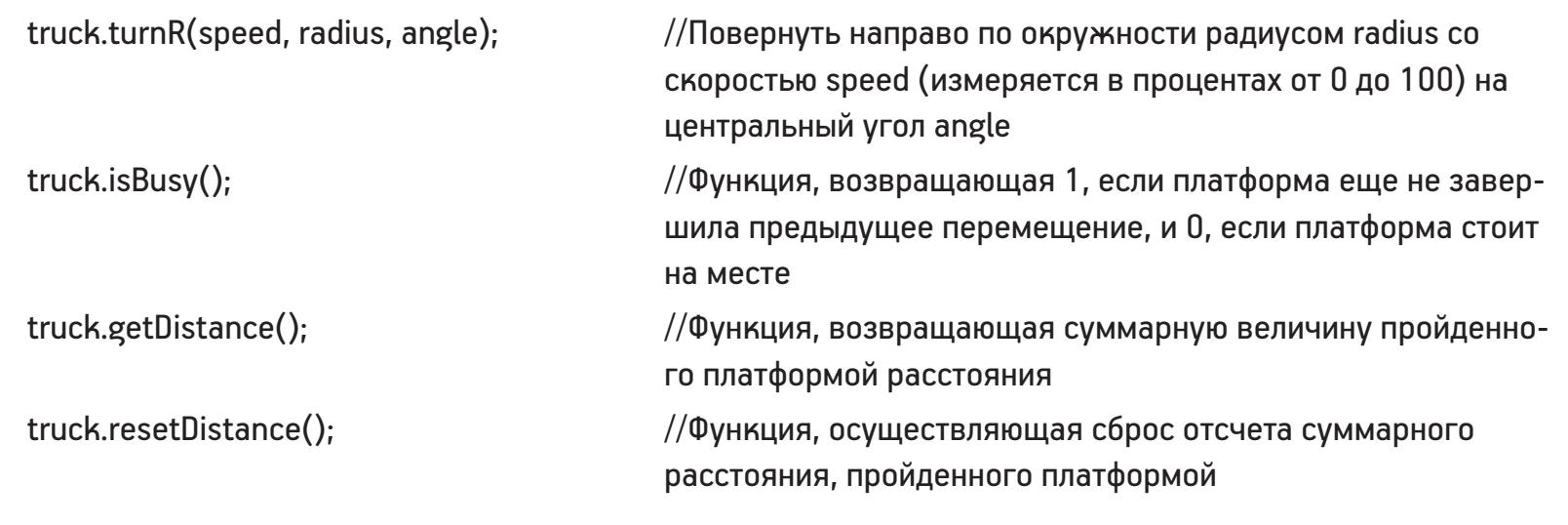
Для управления платформой целиком применяются функции:
Контроллер ВЕРТОР СТАНДАРТ поддерживает работу не только с электродвигателями, но и со стандартными хобби-сервоприводами. Для управления серводвигателями предусмотрена отдельная библиотека.
Пример для изучения сервопривода находится в папке Sketches и имеет название example_smoothServo
По аналогии с мотор-редукторами скетч должен начинаться с подключения библиотеки и инициализации серводвигателя:

Для инициализации сервопривода применяется функция new SmoothServo(a), где: a – номер разъема для подключения сервоприводов.
![]()
Для настройки динамических возможностей сервопривода применяются функции:

Для управления сервоприводом используются функции:

4. Технические характеристики
| Наименование характеристики | Значение |
| Размеры контроллера | 58х90мм |
| Количество разъемов XH-2.54-4P общего назначения | 8 |
| Количество разъемов XH-2.54-4P с протоколом I2C | 5 |
| Максимальное количество подключаемых электродвигателей | 4 |
| Максимальное количество подключаемых серводвигателей | 8 |
| Размеры разъема питания | 5,0х2,1 мм |
| USB разъем | тип В |
| Наличие выключателя питания | да |
| Допустимый диапозон входного напряжения питания | 7,5...12В |
| Диапозон регулировки напряжения питания сервоприводов при входном напряжении питания 7,5 В | 4,9...7,2 В |
| Диапозон регулировки напряжения питания сервоприводов при входном напряжении питания 9 В | 4,9...8,2 В |
| Диапозон регулировки напряжения питания сервоприводов при входном напряжении питания 12 В | 4,9...9,2 В |
| Диапозон регулировки напряжения питания электродвигателей при входном напряжении питания 7,5 В | 4,4...6,5В |
| Диапозон регулировки напряжения питания электродвигателей при входном напряжении питания 9 В | 4,4...7,6 В |
| Диапозон регулировки напряжения питания электродвигателей при входном напряжении питания 12 В | 4,4...8,7В |
| Номинальное рабочее напряжение микроконтроллера на разъемах общего назначения и разъемах I2C | 5 В |
| Максимальный суммарный ток потребления модулей, подключенных к разъемам общего назначения и разъемам I2C | До 0,5 А |
| Максимальный суммарный ток потребления электроприводов, подключенных к микроконтроллеру | До 2,5 А |
| Тактовая частота микроконтроллера | 16 МГц |
| Оперативная память | 2кБ |
| Встроенная Флеш-память | 32 Кб ( ATmega32u4) из которых 4 кб используются для загрузчика |
| Программное обеспечение для программирования контроллера |
Arduino IDE |
Программируемый контроллер ПЭМ10.3158 Вертор Стандарт V1.2 доступен для приобретения в магазине Эвольвектор.
5. Условия гарантии
ООО «Эвольвектор» гарантирует работоспособность электронного модуля на протяжении всего гарантийного срока эксплуатации, который составляет 12 месяцев с момента приобретения устройства. Также гарантируется совместимость модуля с другими устройствами системы управляющей электроники ВЕРТОР.
Гарантийные обязательства производителя распространяются только на ту продукцию, которая не имеет повреждений и не выведена из строя в результате неверных действий пользователя.
По вопросам гарантийного обслуживания, а также по всем техническим и информационным вопросам можно обращаться на электронную почту:
info@evolvector.ru
help@evolvector.ru
а также по телефону +7 (499) 391-01-05
Адрес для корреспонденции: 143300, Московская область, г. Наро-Фоминск, ул. Московская, д.15.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: