


Электронный модуль "Энкодер мотор-редуктора"

1. Назначение устройства
Электронный модуль ПЭМ10.122 «Энкодер для мотор-редуктора» (Рис. 1.1) является элементом системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР) и относится к классу датчиков. Он предназначен для определения угла поворота, направления и скорости вращения выходного вала мотор-редуктора ПД7.20080-2 и его разновидностей по частоте вращения выходного вала. Указанные параметры определяются модулем относительно некоторого начального положения вала после запуска контроллера. Устройство может применяться преимущественно при создании систем навигации учебных моделей роботов, а также в тех проектах, где требуется регулирование мотор-редукторов по углу поворота или скорости вращения вала.
 |
| Рис. 1.1 |
Модуль не является автономным устройством и рассчитан на применение совместно с программируемыми контроллерами и шилдами, входящими в систему ВЕРТОР (подробная информация о системе представлена на сайте https://academy.evolvector.ru).
2. Конструкция модуля и назначение выводов (контактов)
Модуль «Оптический энкодер» выполнен в форме печатной платы, на которой запаяны разъем, с помощью которого осуществляется подключение модуля к контролеру системы ВЕРТОР, оптический чувствительный элемент и компоненты, необходимые для корректной работы устройства.
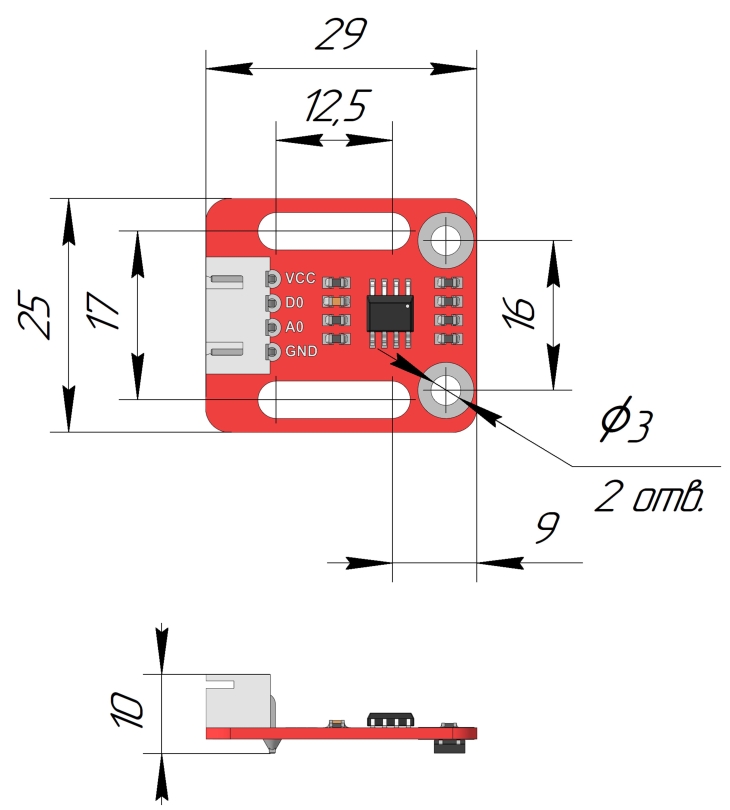
Плата имеет типоразмер U1 (1 unit) и оснащена двумя пазовидными крепежными отверстиями с размерами, подходящими под использование винтов М3. Межосевое расстояние указанных отверстий соответствует расположению крепежных отверстий на мотор-редукторах указанного выше типа, чтобы было возможно крепление энкодера непосредственно к корпусу мотор-редуктора. Габаритные и присоединительные размеры модуля, а также комментарии по назначению контактов разъема представлены на рисунках 2.1 и 2.2.
|
|
| Рис. 2.1 |
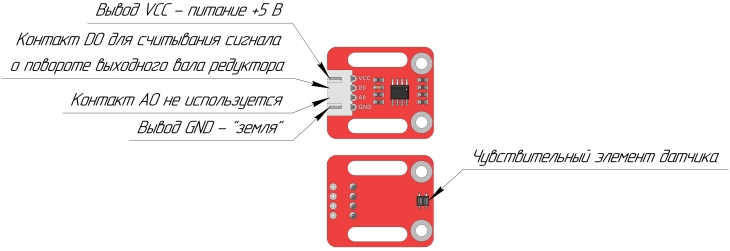 |
| Рис. 2.2 |
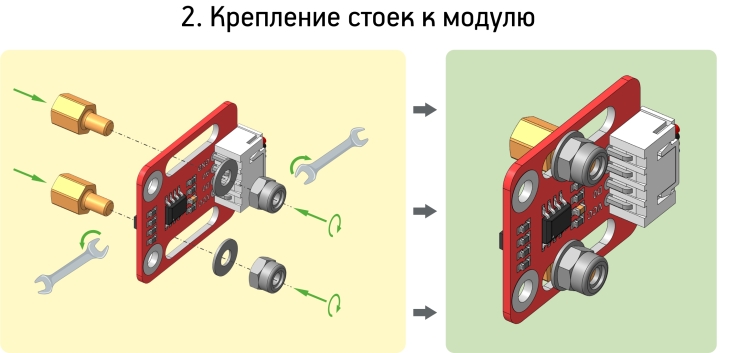
По расстоянию между дополнительными крепежными отверстиями модуль совместим с конструкторами Эвольвектор, LEGO, MakeBlock, и может крепиться к их деталям с помощью стоек.
Подключение модуля осуществляется с помощью разъема XH-2.54-4P, выводы которого имеют следующее назначение:
VCC - к “+” источника питания контроллера;
DО - к цифровому выводу контроллера (непосредственно применяется для считывания информации с оптического энкодера);
AO - не применяется при эксплуатации данного модуля;
GND - земля (общий провод).
Для указанных контактов на печатной плате модуля нанесена соответствующая маркировка белого цвета.
3. Принцип работы
Принцип действия энкодера основан на оптическом методе определения угла поворота вала, в основе которого лежит тот же алгоритм работы, что и у датчика линии ПЭМ10.155.
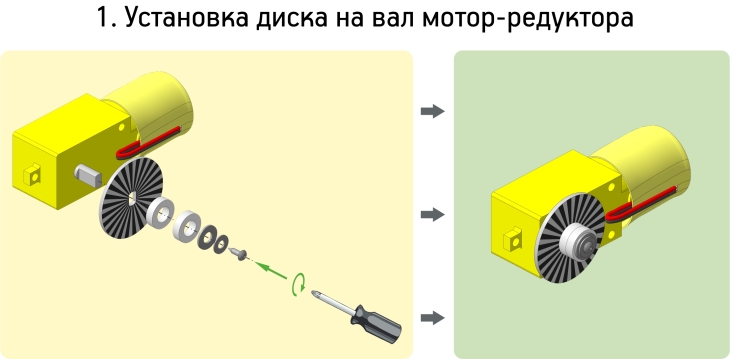
Для этого на вал мотор-редуктора устанавливается идущий в комплекте с модулем специальный диск, на который нанесены чередующиеся черные и белые секторы. Причем на разные стороны диска нанесено разное количество секторов, чем обеспечивается вариативность их ширины, от которой зависит точность регулирования (Рис. 3.1).
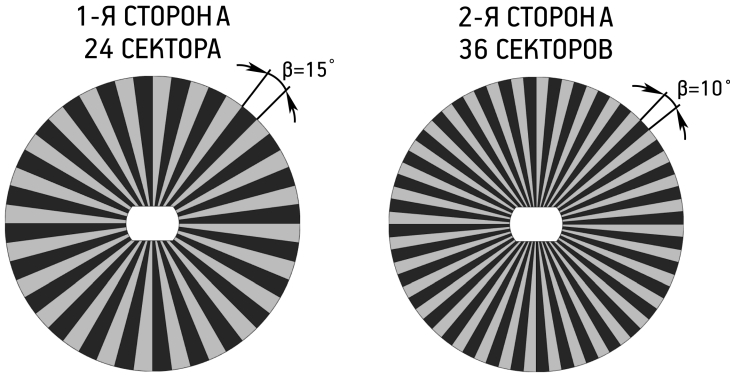 |
| Рис. 3.1 |
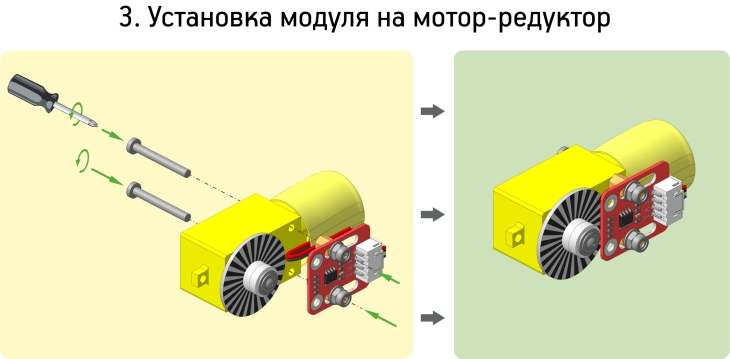
Модуль крепится к корпусу мотор-редуктора таким образом, чтобы чувствительный элемент, с помощью которого определяется цвет секторов, располагался над диском ближе к его внешнему краю. Регулирование местоположения платы датчика над диском производится благодаря пазовидным отверстиям, позволяющим перемещать модуль относительно крепежных винтов. На рисунках 3.2, 3.3 и 3.4 показаны этапы установки энкодера и вспомогательного диска на мотор-редуктор.
 |
|
Рис.3.2
|
 |
|
Рис. 3.3
|
 |
| Рис. 3.4 |
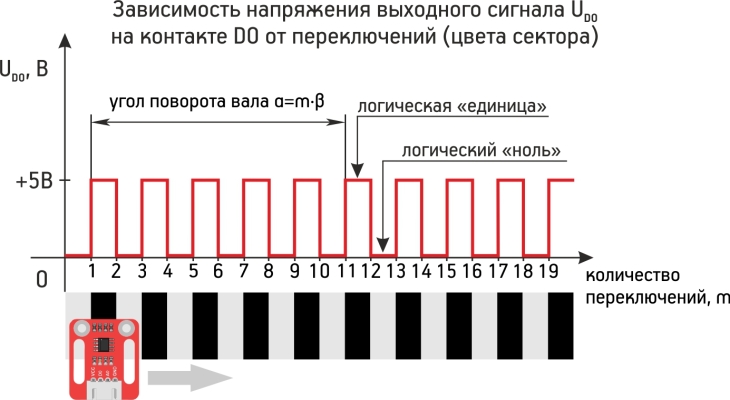
В процессе вращения вала с ним вращается диск, а модуль энкодера с помощью оптического элемента определяет то, черный или белый сектор в текущий момент находится под ним. В зависимости от этого на выходе DO появляется либо логический «0», либо логическая «1». На Рис. 3.5 показана зависимость напряжения на контакте DO от цвета сектора при вращении диска относительно модуля, а также пронумерованы переключения между логическими значениями.
 |
| Рис. 3.5 |
Угол между границами каждого сектора составляет 15° или 10° в зависимости от стороны диска. На рис. 3.1 этот угол обозначен буквой β. Получается, что переключение с низкого напряжения на высокое, также как и с высокого на низкое на контакте DO означает поворот вала редуктора на этот угол. Соответственно при подсчете количества таких переключений определяется величина угла поворота вала и при необходимости количество полных оборотов вала.
Например, на рис. 3.5 показан принцип вычисления угла поворота вала редуктора для случая, когда к датчику обращена первая сторона (24 сектора, β = 15°) и произошло 11 переключений выходного сигнала на контакте DO (диск повернулся на 11 секторов относительно датчика). Количество переключений обозначено буквой m. Получится, что угол поворота вала составит:
![]() .
.
Если необходимо определение угловой скорости вращения вала мотор-редуктора, то тогда в программе определяется время Tп, проходящее между переключениями. Исходя из этого угловая скорость может быть вычислена по формуле:
![]()
а частота вращения может быть рассчитана следующим образом:
![]()
На рисунке 3.6 показаны поясняющие графики изменения напряжения на выходе DO при частоте вращения 50 об/мин и 100 об/мин с указанием времени Тп между переключениями с одного значения напряжения на другое.
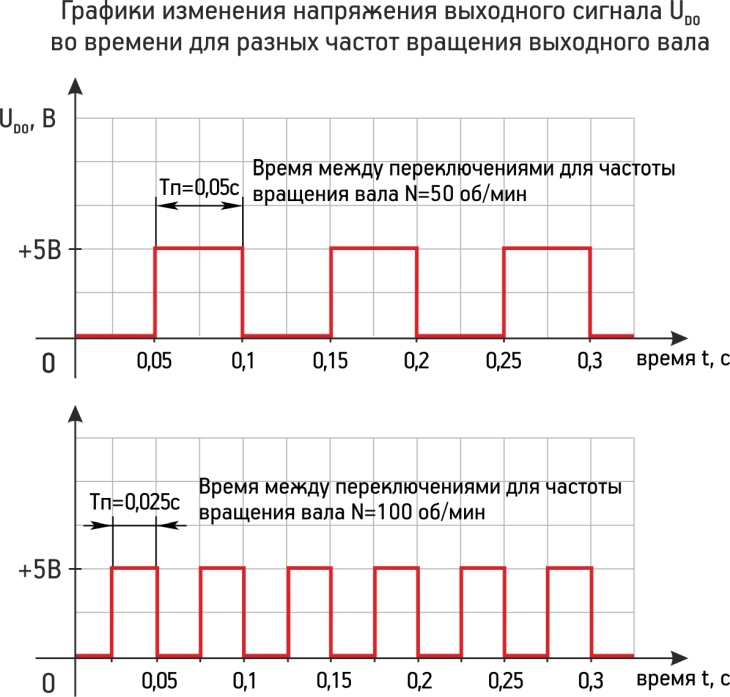 |
| Рис. 3.6 |
Для стабильной работы модуля и корректного считывания данных, рекомендуется установка модуля относительно мотора так, чтобы расстояние между черно-белым диском и чувствительным элементом модуля находилось в диапазоне 1...1,5 мм (Рис. 3.7).
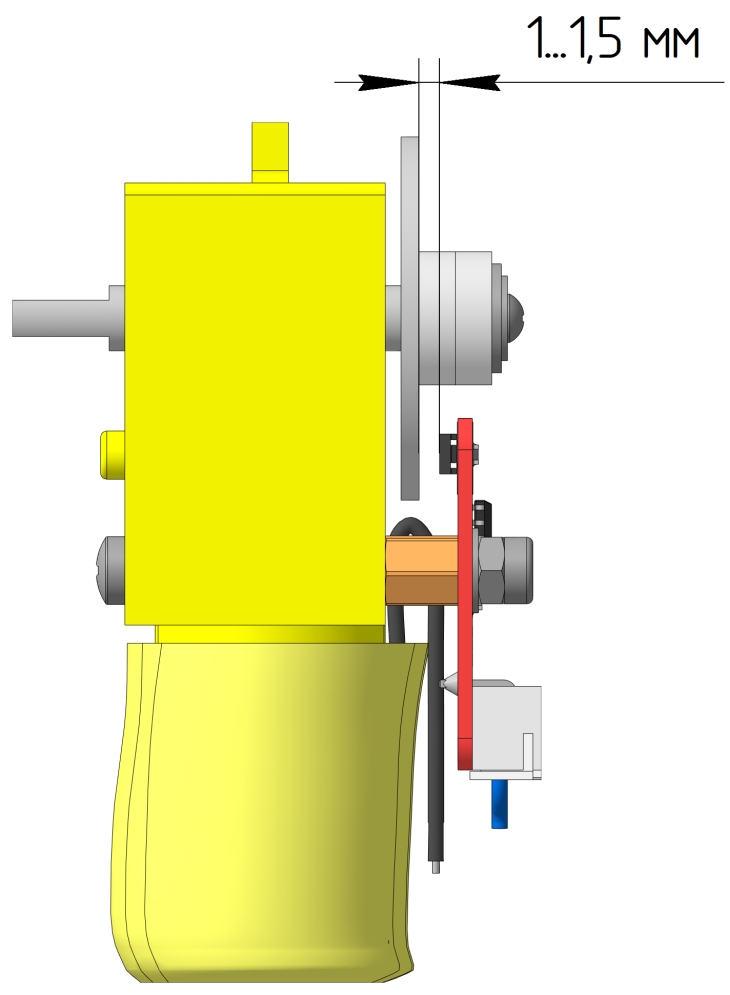 |
| Рис. 3.7 |
4. Технические характеристики
|
Наименование характеристики |
Значение |
|
Типоразмер |
1U, 25x29 мм |
|
Тип разъема |
XH-2.54-4P |
|
Номинальное напряжение питания, В |
5 |
|
Суммарное количество черных и белых секторов на 1-й стороне диска |
24 |
|
Суммарное количество черных и белых секторов на 2-й стороне диска |
36 |
|
Максимальная допустимая частота вращения вала для 1-й стороны (24 сектора), об/мин |
250 |
|
Максимальная допустимая частота вращения вала для 2-й стороны (36 секторов), об/мин |
200 |
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: