


Программируемый контроллер Вертор КЛАССИК V1.0

1. Назначение устройства.
Программируемый контроллер ПЭМ10.1153 Вертор КЛАССИК V1.0 (Рис. 1.1) является одним из элементов системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР). Он предназначен для изучения принципов создания систем управления различного назначения в рамках основного и дополнительного школьного образования. Оснащен гнездовыми колодками, вследствие чего подразумевается подключение к нему компонентов или модулей управляющей системы с помощью штырьковых проводов и макетной платы. Либо возможна установка сверху совместимых шилдов — плат, оснащенных штырьковым соединителем, штырьки которого помещаются в гнезда колодок на контроллере.
|
|
| Рис. 1.1 |
Указанный контроллер может использоваться для создания электронных систем управления какими-либо устройствами, в том числе робототехническими моделями. В рамках стандартных функциональных возможностей контроллер может принимать сигналы от датчиков, обрабатывать их и формировать управляющие сигналы для исполнительных устройств согласно загруженной в него программе.
ВЕРТОР Классик является основой конструкторов «Эвольвектор», ориентированных на изучение программируемых контроллеров и относящихся к образовательному направлению «Электроника».
2. Конструкция контроллера и назначение выводов (контактов).
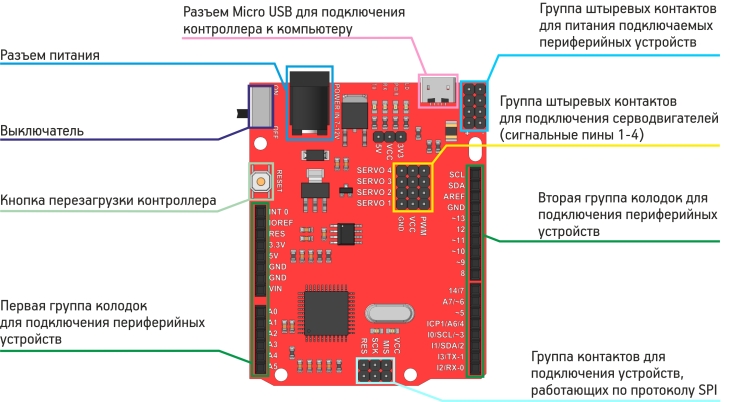
Контроллер выполнен в виде печатной платы, которая оснащена следующими элементами (Рис. 2.1):
-группами колодок типа «гнездо» для подключения переферийных устройств;
-
разъемом питания под штекер размером 5,0х2,1 для подачи питания с напряжением 7-12 В от заряжаемого модуля, батарейного отсека или сетевого блока питания;
- группой штыревых контактов для подключения стандартных RC минисерводвигателей (ток, суммарно потребляемый всеми приводами не должен превышать 300 мА), номера контактов в Arduino IDE 4, 7, 8, 12;
- группой штыревых контактов для подключения устройств, обменивающихся данными по протоколу SPI (RES, SCK, MISO, MOS);
-
разъемом Micro USB для подключения контроллера к персональному компьютеру и загрузки в него программ управления (скетчей);
-
выключателем питания для контактов сервоприводов;
-
группой штыревых контактов для питания собираемых на макетной плате устройств;
-
кнопкой принудительной перезагрузки контроллера в случае его сбоя или не корректной работы.
|
|
| Рис. 2.1 |
На рисунке 2.2 представлен внешний вид контроллера с указанием габаритных размеров, а также расположение и размеры крепежных отверстий.
|
|
| Рис. 2.2 |
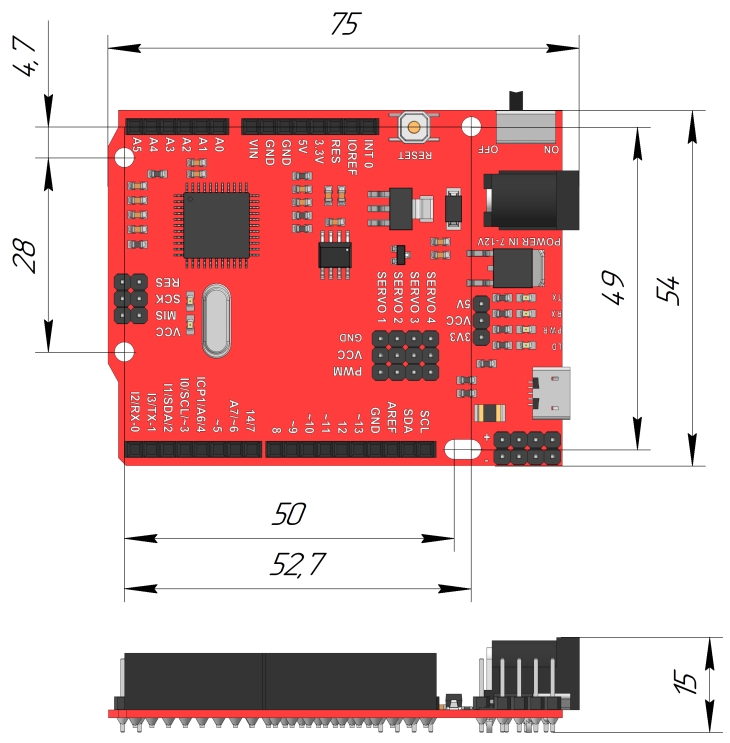
Расположение и форма крепежных отверстий на плате контроллера ВЕРТОР Классик соответствует расположению крепежных отверстий оригинального контроллера Arduino Uno.
Все доступные пользователю выводы в колодках делятся на цифровые и аналоговые. Цифровые выводы пронумерованы с 0 до 13, а аналоговые от А0 до А5. Цифровые пины, имеющие поддержу ШИМ отмечены знаком «~». К ним относятся пины «~3», «~5», «~6», «~9», «~10», «~11», «~13».
Помимо этого, присутствуют контакты питание 5v; питание 3.3v; «земля». Также плата оснащена выводами для подключения устройств, обменивающихся данными по протоколу I2C (SCL, SDA); выводом для подачи опорного напряжения (AREF); выводом для сброса контроллера (RESET); выводом, на который подается сигнал внешнего прерывания (PCINT0).
3. Принцип работы контроллера.
Контроллер ВЕРТОР Классик построен на платформе Arduino Leonardo и фактически является доработанной версией указанной платы. Как у любого другого контроллера в общем случае принцип его работы сводится к приему сигналов от датчиков, обработке их, и формированию управляющих сигналов для исполнительных устройств (индикаторов, двигателей и т.д.) в соответствии с загруженной программой.
В качестве датчиков могут выступать любые сенсорные электронные компоненты или электронные модули (устройства), которые выдают аналоговые или цифровые сигналы с рабочим уровнем напряжения 3,3-5 В.
В качестве исполнительных устройств могут быть подключены индикаторы, экраны или электроприводы. При этом рабочий уровень напряжения выходных сигналов на выводах контроллера для управления исполнительными элементами составляет только 5 В. Допускается суммарное токопотребление всех исполнительных устройств не более 0,3 А. Для управления периферией с более высоким потребляемым током необходимо обязательно (!!!) использовать вспомогательные модули (драйверы), иначе контроллер может выйти из строя.
Алгоритм обработки входных сигналов и порядок генерирования выходных определяются программой (скетчем), загруженной в контроллер. Указанная программа создается в среде программирования Arduino IDE на любом персональном компьютере или ноутбуке, который удовлетворяет системным требованиям данного программного обеспечения.
Созданный скетч загружается из Arduino IDE в контроллер через USB подключение с помощью стандартного USB кабеля. Дополнительных программаторов для загрузки программ в контроллер не требуются. При первом подключении драйвер работы с платы обычно устанавливается автоматически. Если этого не произошло по каким-либо причинам, то драйвер устанавливается в ручном режиме. С инструкцией по его установке можно ознакомиться в соответствующем разделе сайта Академии Эвольвектор. В разделе сайта «Скачать» драйвер доступен для скачивания.
Информация о принципах подключения к контроллеру периферийных устройств и создания для них управляющих программ представлена в учебных пособиях к конструкторам «Эвольвектор» из категории «Изучение программируемых контроллеров» образовательного направления «Электроника».
4. Технические характеристики
Наименование характеристики |
Значение |
|
Размеры контроллера, мм |
54х75 |
|
Количество цифровых выводов, шт. |
14 |
|
В составе цифровых выводов наличие выводов с поддержкой ШИМ, шт. |
7 |
|
Количество аналоговых выводов, шт. |
6 |
|
Максимальное количество подключаемых серводвигателей (с суммарной нагрузкой не более 300 мА), шт. |
4 |
|
Размеры разъема питания, мм |
5,0х2,1 |
|
Тип USB разъема |
Micro |
|
Наличие выключателя питания |
Да |
|
Допустимый диапазон входного напряжения питания, В |
7...12 |
|
Номинальное рабочее напряжение микроконтроллера, В |
5 |
|
Максимальный суммарный ток потребления устройств, подключенных к контроллеру, А |
Не более 0,3 |
|
Тактовая частота микроконтроллера, МГц |
16 |
|
Оперативная память, Кб |
2 |
|
Встроенная Флеш-память, Кб |
32 (Atmega32u4), из которых 4 Кб используются для загрузчика |
|
Программное обеспечение для программирования контроллера |
Arduino IDE |
Программируемый контроллер ПЭМ10.1153 Вертор КЛАССИК V1.0 доступен для приобретения в магазине Эвольвектор.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: