


Плата расширения «QuatroPortA100»

1. Назначение устройства
Плата расширения «QuatroPortA100» ПЭМ10.1100 (Рис. 1.1) предназначена для работы совместно с программируемым контроллером Вертор Классик. Ее функция сводится к обеспечению дополнительных возможностей по управлению электроприводами (электромоторами и серводвигателями) и подключению к выведенным разъемам модулей системы ВЕРТОР.
Плата оснащена двумя одноканальными драйверами моторов, что позволяет на основе контроллера Вертор Классик создавать мобильных двухприводных роботов.
Рис. 1.1
2. Конструкция платы расширения и назначение выводов (контактов)
Плата расширения выполнена в виде печатной платы, оснащенной следующими элементами (Рис. 2.1):
- группами колодок с контактами типа «гнездо», транслирующих контакты основного контроллера;
- разъемами типа XH-2.54-4P для подключения совместимых электронных модулей системы ВЕРТОР;
- шестью группами штыревых контактов для подключения стандартных RC серводвигателей малой мощности;
- клеммниками для подсоединения двух электрических двигателей, соответствующих требованиям номинального напряжения и мощности;
- разъемом питания под штекер размером 5,5х2,1 для подачи электроэнергии от заряжаемого модуля или иных источников питания;
- колодкой типа «гнездо» для подключения устройств по последовательной шине с протоколом UART;
- выключателем питания для клеммников электродвигателей и контактов сервоприводов;
- кнопкой принудительной перезагрузки контроллера в случае его сбоя или некорректной работы.
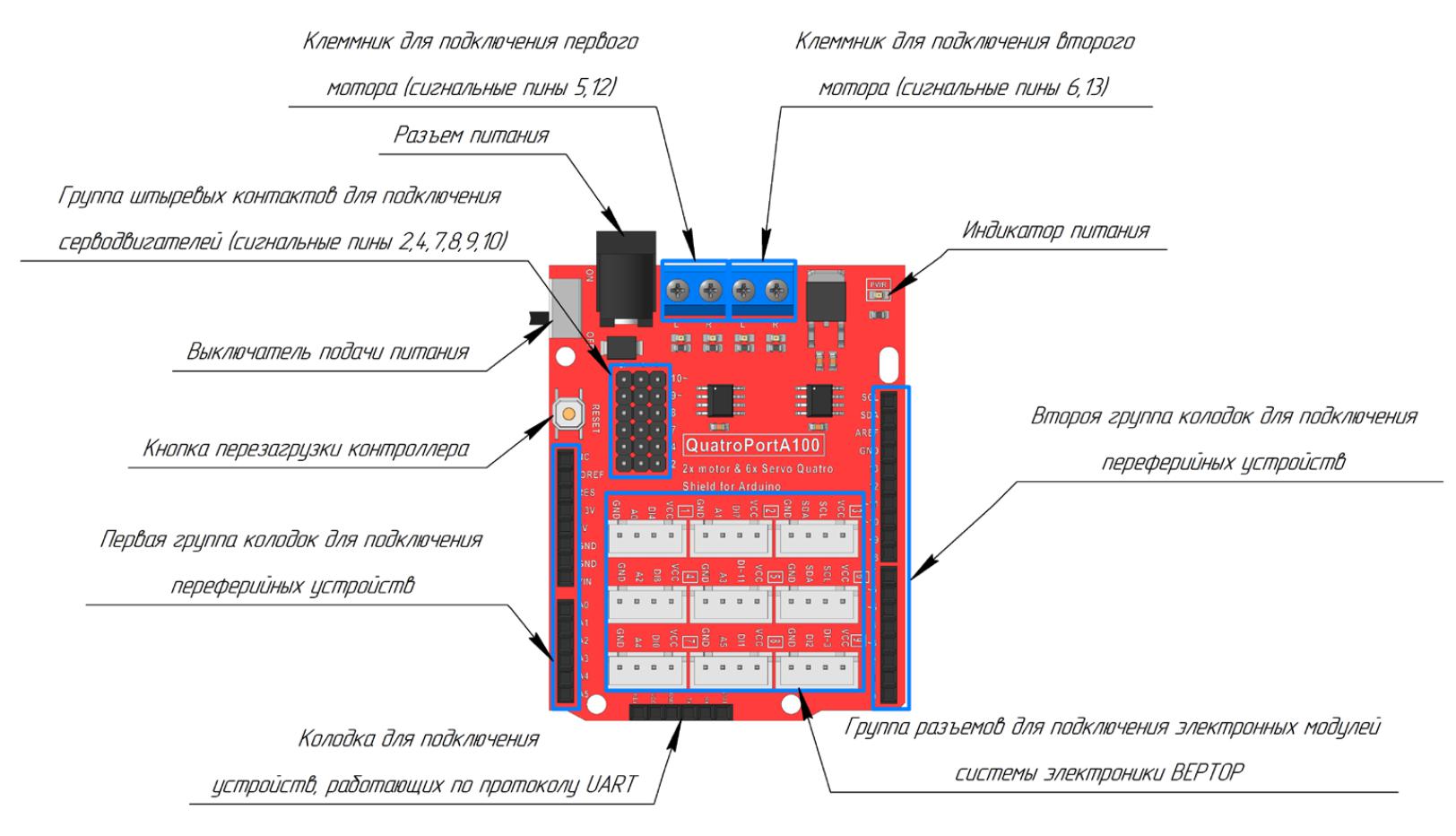
Рис. 2.1
На рисунке 2.2 представлен внешний вид платы с указанием габаритных размеров, размеров крепежных отверстий и их расположения.
Расположение и форма крепежных отверстий на плате расширения соответствует расположению крепежных отверстий оригинального контроллера Arduino Leonardo или Arduino Uno.
Все доступные пользователю выводы делятся на цифровые и аналоговые. Цифровые выводы пронумерованы от 0 до 13, а аналоговые от А0 до А5. Цифровые пины, имеющие поддержу ШИМ, отмечены знаком «~». К ним относятся пины «~3», «~5», «~6», «~9», «~10», «~11», «~13». Также на колодки выведены разъемы: питание 5v; питание 3.3v; «земля»; разъемы для подключения устройств, обменивающихся данными по протоколу I2C (SCL, SDA); вывод для подачи опорного напряжения (AREF); вывод для сброса контроллера (RESET).
На плате расширения смонтированы четырехконтактные разъемы типа XH-2.54-4P, с помощью которых пользователи получают возможность использовать контроллер Вертор Классик совместно с модулями системы электроники ВЕРТОР. Общей чертой всех разъемов является наличие выводов питания (VCC) и «земли» (GND), которые расположены по краям разъема. В части же сигнальных контактов, размещенных в центре разъема, существуют отличия.
Разъемы С1, С2, С4, С5, С7 - С9 являются разъемами общего назначения. Все эти разъемы (за исключением разъема С9, имеющего две цифровые линии) имеют один цифровой (промаркирован просто числовым номером) и один аналоговый (промаркирован буквой А с номером) контакты. К таким возможно подключение датчиков, выдающих аналоговый сигнал.
Разъемы С3 и С6 предназначены для подключения устройств, работающих по протоколу передачи данных I2C.
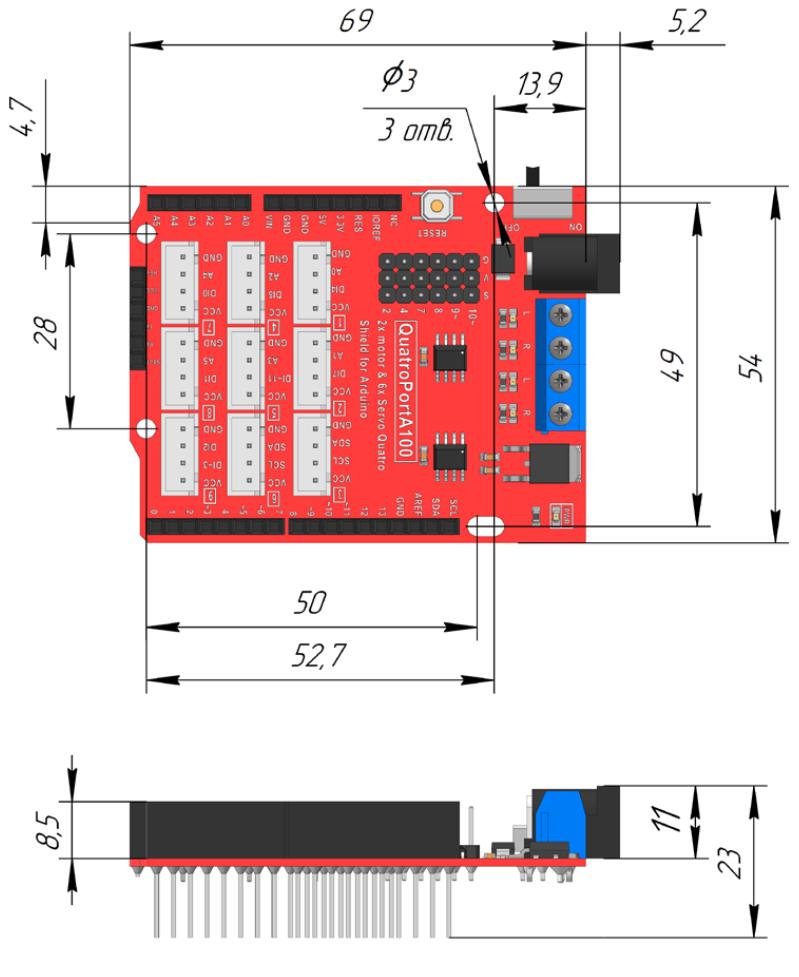
Рис. 2.2
Цифровые контакты, перед номером которых стоит знак тильда (~), поддерживают широтно-импульсную модуляцию, то есть на них может быть сформирован псевдо аналоговый сигнал.
Плата расширения предусматривает наличие выводов для подключения до 6-ти серводвигателей. Для этого используются цифровые пины 2, 4, 7, 8, 9, 10. Также, для подключения моторов, на плате смонтированы клеммники, в которые зажимаются выводы мотора. Для управления скоростью и направлением вращения первого мотора предназначены пины 5 и 12. Управление вторым мотором осуществляется с применением пинов 13 и 6. Максимальное напряжение питания подключенных электроприводов не превышает 6 В.
3. Принцип работы платы расширения
Плата «QuatroPortA100» называется платой расширения потому что она расширяет возможности классических контроллеров Ардуино, которые в базовой конфигурации не могут управлять электродвигателями и несовместимы с системой модулей ВЕРТОР, основанной на использовании 4-х контактных разъемов.
Плата решает как вопрос функциональной совместимости контроллера с модулями, так и проблему высокого токопотребления моторов и серводвигателей относительно возможностей контроллера по питанию.
Плата оснащена разъемом 2,1х5,5 мм для подачи внешнего питания в количестве, достаточном для работы подключенных приводов.
Данное питание подается на стабилизатор, выдающий 0,5 А на штыри питания серводвигателей, и на смонтированные на плате два драйвера двигателей L9110. Указанные драйверы подключены каждый к своему клеммнику и каждый из них способен выдавать ток до 1 А для питания электродвигателя.
Напряжение питания серводвигателей составляет 6 вольт, а напряжение питание электромоторов такое же, как входное напряжение с внешнего источника.
Что касается разъемов на плате для подключения модулей, то они запитываются непосредственно от линии питания контроллера и подключение к ним модулей осуществляется в соответствии с документацией на сами модули. Необходимо определять, какие контакты задействованы для взаимодействия с датчиками или исполнительными устройствами, и управлять ими с помощью контроллера с загруженным скетчем. Номера контактов Ардуино, подведенные к разъемам, промаркированы рядом с разъемами.
Аналогичная ситуация и с серводвигателями. Напротив каждого ряда штырей промаркирован номер сигнального пина, который выполняет управление подключенным сервомотором.
Управление двигателями выполняется так же, как и на большинстве обычных драйверов двигателей. Микросхемы драйверов соединены с управляющими пинами контроллера 5, 12 (первый мотор) и 6,13 (второй мотор). Пины 5 и 13 поддерживают ШИМ (широтно-импульсную модуляцию сигнала), с помощью которой можно плавно регулировать скорость вращения выходных валов электродвигателей.
На рисунке 3.1 показан пример подключения двух электродвигателей к плате расширения, установленной на контроллер.
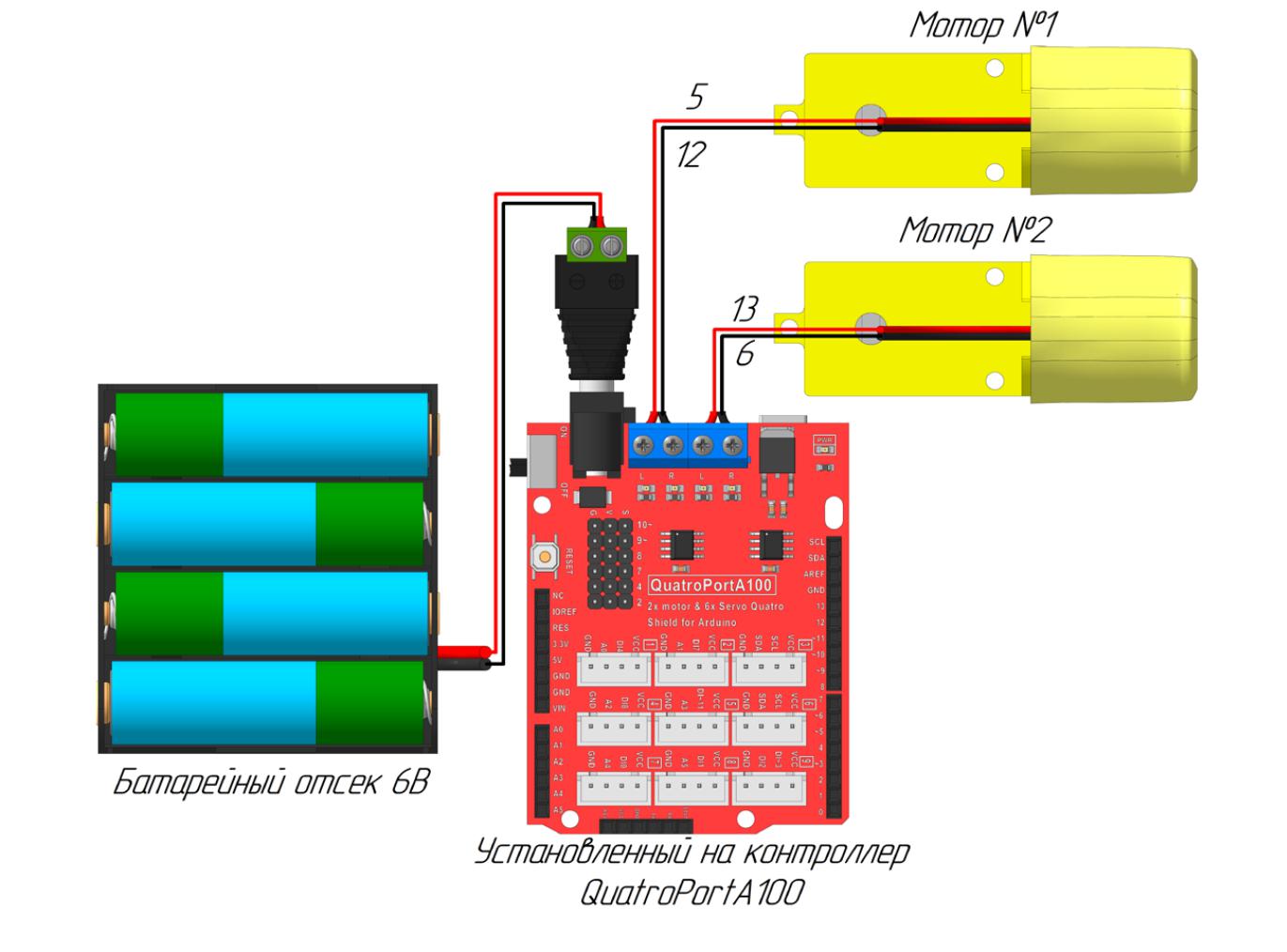
Рис. 3.1
На рисунках 3.2 и 3.3 проиллюстрирован принцип управления моторами (№1 и №2) при подключении к
плате согласно схемы рис. 3.1.
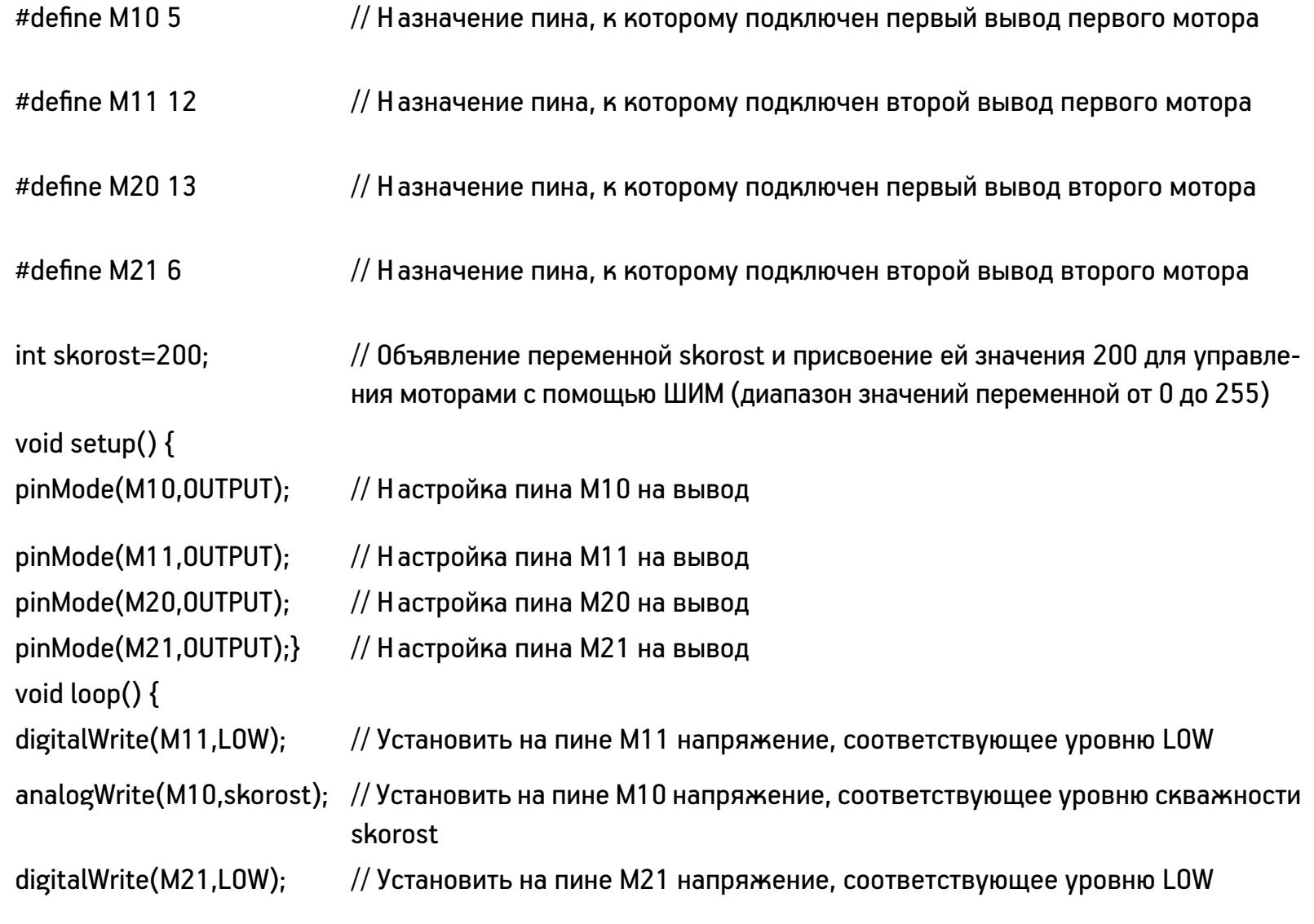
Отличительной особенностью платы расширения по сравнению с контроллерами Вертор Стандарт и Вертор
Мега является то, что для работы с моторами не требуются специализированные библиотеки. Управление
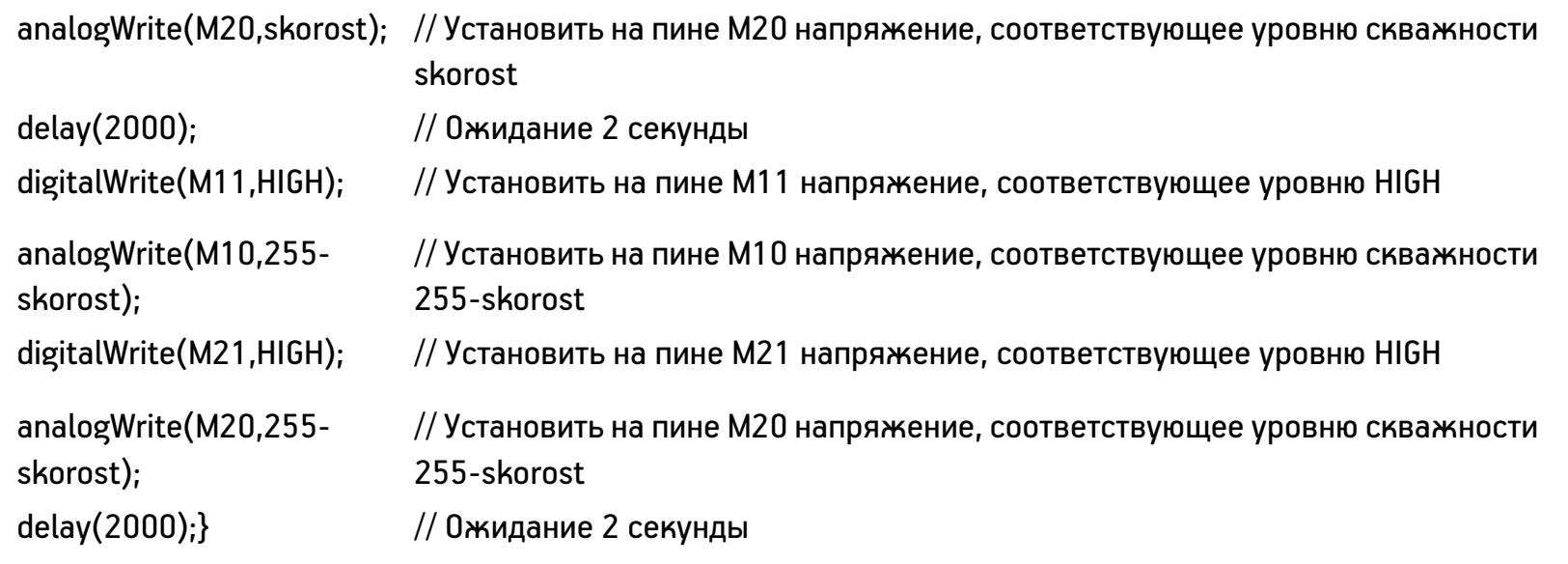
двигателями выполняется с помощью стандартных команд Arduino IDE. Ниже приведен пример скетча с простым алгоритмом. Он сводится к тому, что два мотора вращаются две секунды в одну сторону с определенной
скоростью, а потом две секунды в другую сторону с такой же скоростью. Цикл повторяется бесконечно.
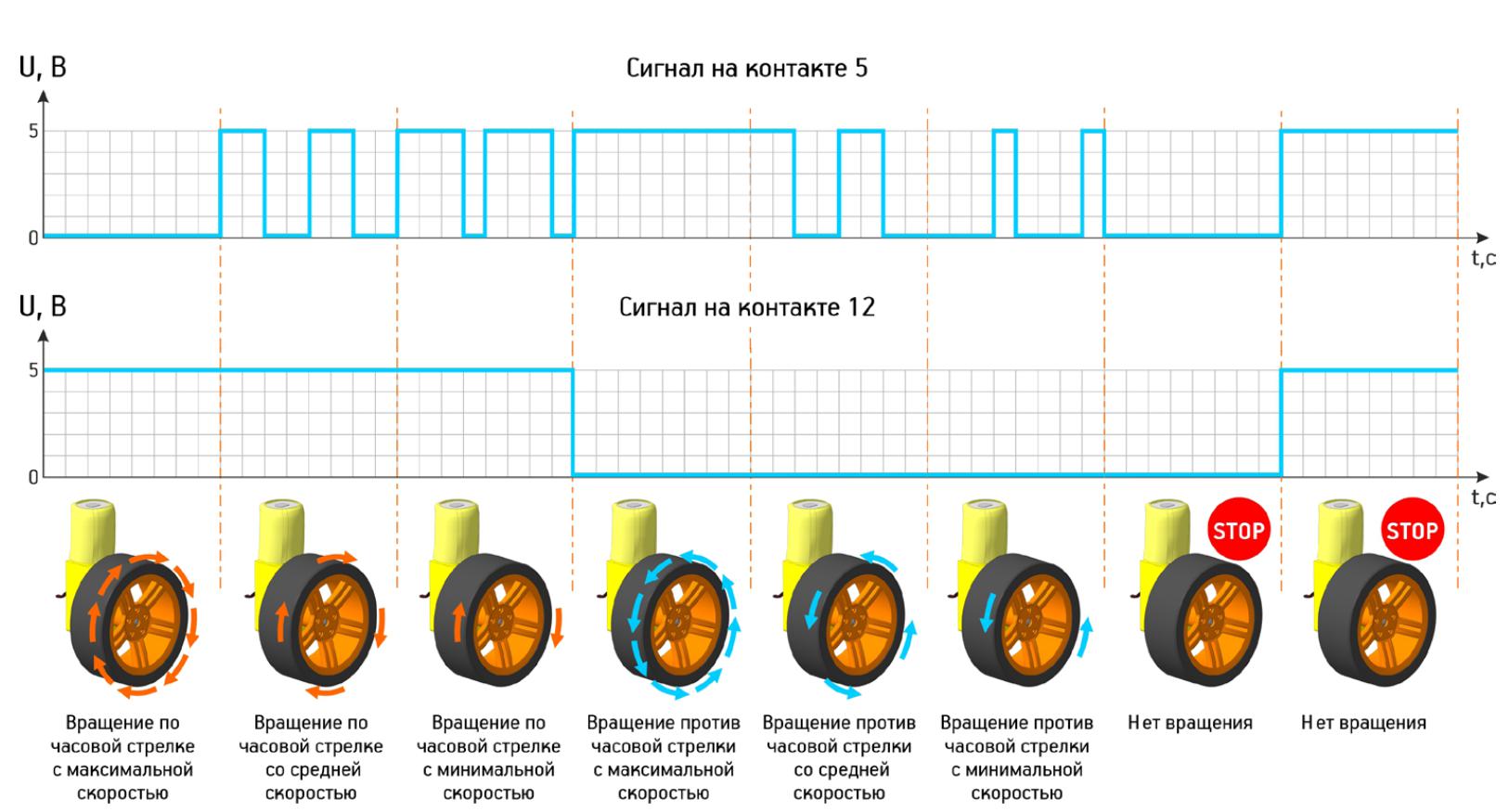
Рис. 3.2
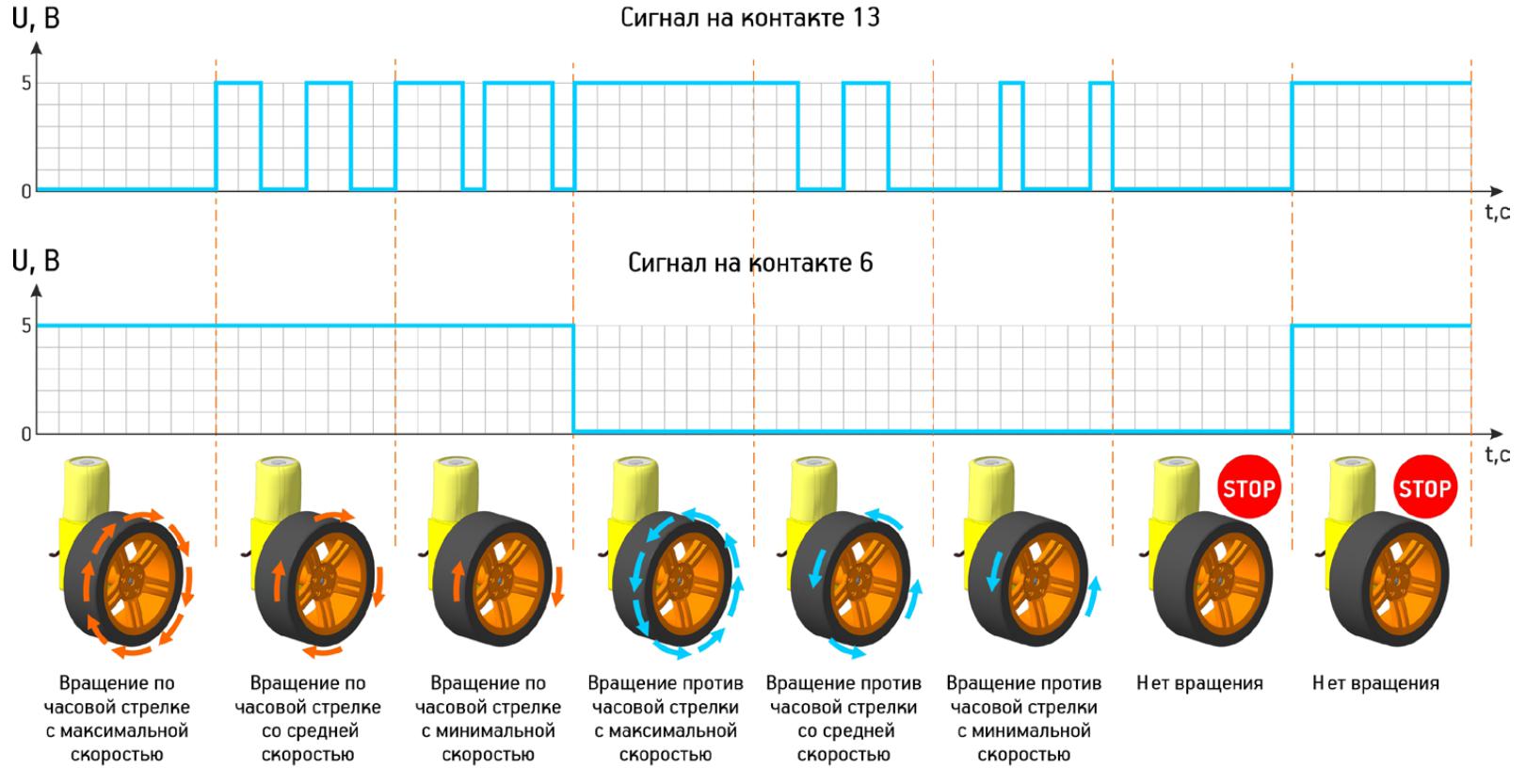
Рис. 3.3
Для работы с сервоприводами применяется стандартная библиотека «Servo.h». Правила ее использования вы сможете найти в учебных пособиях конструкторов «Эвольвектор».
4. Технические характеристики
| Наименование характеристики | Значение |
| Габаритные размеры платы расширения, мм | 54х69 |
| Количество цифровых выводов | 14 |
| Количество цифровых выводов с поддержкой работы с ШИМ | 7 |
| Количество аналоговых выводов | 6 |
| Количество разъемов XH-2.54-4P общего назначения | 7 |
| Количество разъемов XH-2.54-4P с протоколом I2C | 2 |
| Максимальное количество подключаемых электродвигателей | 2 |
| Максимальный ток потребления одним электродвигателем, А | До 1 |
| Максимальное количество подключаемых серводвигателей | 6 |
| Суммарный ток потребления серводвигателями, А | Не более 0,5 |
| Типоразмер разъема питания, мм | 5,0х2,1 |
| Наличие выключателя питания | Да |
| Допустимый диапазон входного напряжения питания, В | 6...12 |
| Номинальное рабочее напряжение в управляющих цепях, В | 5 |
| Напряжение питания электродвигателей, подключенных к клеммникам, В | 6-11 |
| Максимальный суммарный ток потребления подключенных модулей, мА | До 500 |
5. Условия гарантии
ООО «Эвольвектор» гарантирует работоспособность электронного модуля на протяжении всего гарантийного срока эксплуатации, который составляет 12 месяцев с момента приобретения устройства. Также гарантируется совместимость модуля с другими устройствами системы управляющей электроники ВЕРТОР.
Гарантийные обязательства производителя распространяются только на ту продукцию, которая не имеет повреждений и не выведена из строя в результате неверных действий пользователя.
По вопросам гарантийного обслуживания, а также по всем техническим и информационным вопросам можно обращаться на электронную почту:
info@evolvector.ru
help@evolvector.ru
а также по телефону +7 (499) 391-01-05
Адрес для корреспонденции: 143300, Московская область, г. Наро-Фоминск, ул. Московская, д.15.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: