


§ 2.3 Виды соединения деталей. Неподвижное

Итак, крепеж нужен для того, чтобы соединять детали. Однако детали можно соединить по-разному при таком способе соединения.
Взгляните снова на подробно изученный в Главе 1 робот-пылесос. Например, крышка крепится к корпусу жестко и неподвижна относительно него, а щетки, колеса и бампер двигаются относительно корпуса. Получается, что некоторые детали крепятся так, что они сохраняют возможность двигаться относительно тех деталей, к которым они прикреплены. А другие — напротив, крепятся жестко и двигаться не могут.
Отсюда следуют два возможных варианта соединения деталей с точки зрения подвижности.
- Неподвижное. Это когда детали жестко соединены и не могут двигаться друг относительно друга.
- Подвижное. Это соединение, при котором детали сохраняют возможность двигаться по отношению друг к другу.
Первый тип соединения применяется при сборке несущих каркасов машин. Каркас еще называется рамой.
Рама — это жесткая конструкция, на которую крепятся уже все остальные детали и узлы: электронная система управления, приводы, исполнительные механизмы и т. д.
Очевидно, что второй тип соединения используется в тех элементах конструкции робота, где требуется совершать механическую работу. Это может быть движение колесами, ковшом, щетками, манипулятором и много чем еще.
Подвижное соединение является более сложным, поскольку сопровождается тонкостями, связанными с параметрами взаимного движения деталей. Вариантов движения деталей относительно друг друга в подвижном соединении немало, а само соединение как правило требует настройки. Поэтому оно будет рассмотрено чуть позже.
Начать же следует с более простого — неподвижного соединения.
Независимо от типа соединения при закреплении одной детали к другой они контактируют друг с другом. Другими словами, они соприкасаются через часть своих поверхностей. При неподвижном соединении универсальных деталей конструктора эта поверхность почти всегда будет плоскостью. Соединяете вы пластину с уголком, уголок с уголком, пластину с пластиной или другие комбинации деталей — они будут соприкасаться своими плоскими частями.
Возьмите в руки две детали. Например, пластину 3х7 и пластину 9х11. А также винты М3х8 и обычные гайки. Для того чтобы неподвижно соединить две подобные универсальные детали, необходимо выполнить следующие действия:
1. Приложить детали друг к другу нужной плоской стороной и совместить их по отверстиям, как того требует будущая конструкция. Удерживать при этом их надо в одной руке (рис. 2.3.1).
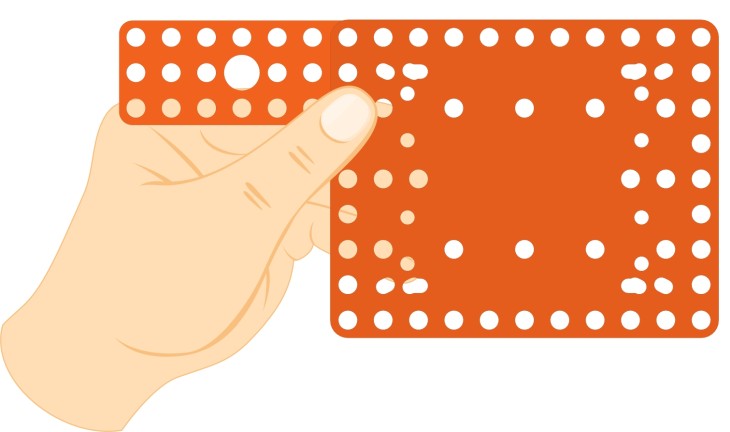 |
| Рис. 2.3.1. Первый этап соединения — приложить и совместить детали, удерживая их в одной руке |
2. После этого вставить винт в одно из отверстий, по которым совмещены детали, и, взяв детали с винтом в другую руку, накрутить на него гайку с обратной стороны, пока она не упрется в деталь (рис. 2.3.2).
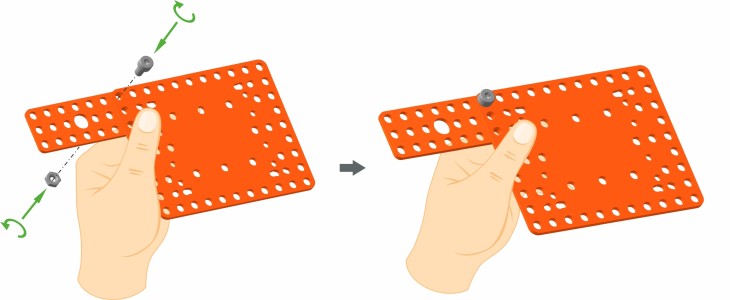 |
| Рис. 2.3.2. Далее производится установка первого винта с гайкой |
3. Выровнять детали по второму отверстию, по которому детали совмещались, и проделать ту же операцию с винтом и гайкой уже для него (рис. 2.3.3).
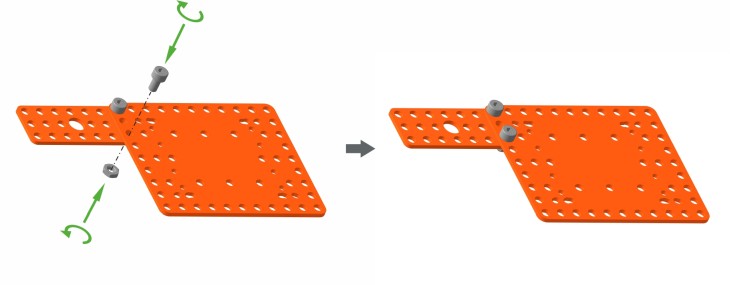 |
| Рис. 2.3.3. И крепление через второе отверстие |
4. Выполнить затяжку гаек с помощью шестигранного и гаечного ключей.
Почему детали соединены с помощью именно двух винтов?
На самом деле их может быть и 3, и 4, и даже более, но точно не менее 2-х. Их количество зависит от размеров деталей, из которых собирается конструкция робота. А еще зависит и от целесообразности. Ведь каждый винт, каждая гайка — это дополнительный вес для робота и дополнительное время для их закручивания при сборке конструкции. Поэтому если в дополнительном креплении нет нужды, то его рекомендуется избегать. Ну а не меньше 2-х винтов потому, что если будет один винт, то ось этого винта по сути станет осью вращения, даже если винт с гайкой хорошо затянуть. В результате вы получите подвижное соединение вместо неподвижного. При закручивании же двух винтов соединение будет гарантированно неподвижным.
Что интересно, вполне может быть такая ситуация, когда для соединения деталей используется только одно место крепления и один винт с гайкой, но детали все равно неподвижны. Это происходит в том случае, если добавляется третья деталь, соединенная одновременно с первыми двумя деталями. Так получается конструкция в виде треугольника, который является самой жесткой и устойчивой конструкцией в технике. Прикрутите с помощью винтов и гаек к большой пластине еще две пластины 1х5, как показано на рис. 2.3.4. После этого попробуйте пошевелить пальцами получившуюся конструкцию в разных направлениях (рис. 2.3.5) и убедитесь, что она получилась жесткая и неподвижная.
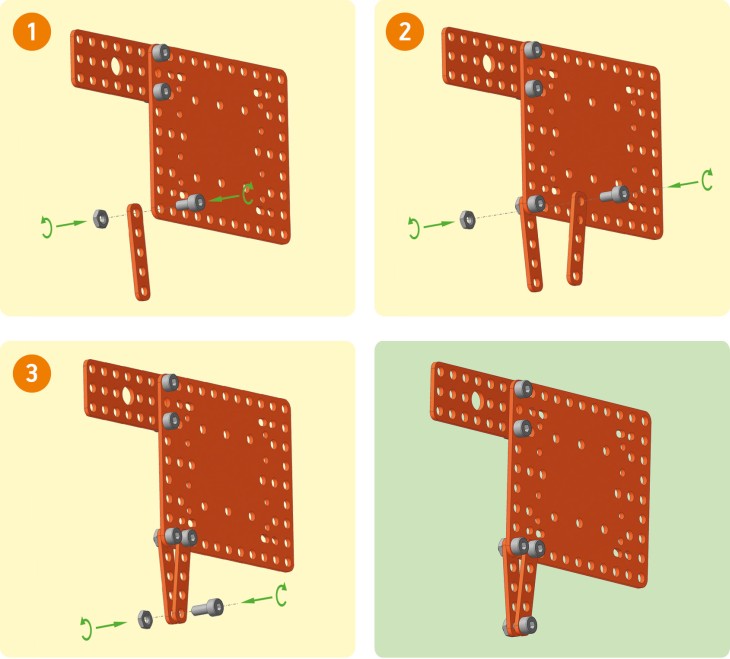 |
| Рис. 2.3.4. Крепление двух пластин 1х5 к пластине 9х11 в виде треугольника |
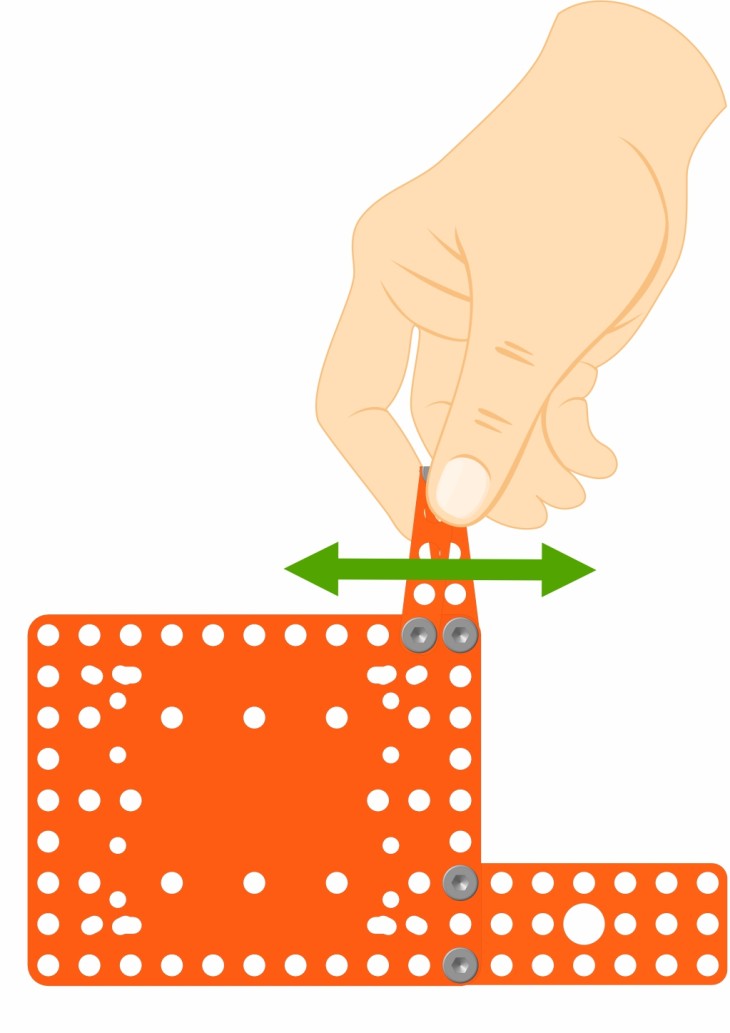 |
| Рис. 2.3.5. Проверьте получившуюся конструкцию на неподвижность |
В целях тренировки по накручиванию гаек на винты и по соединению деталей прикрутите еще несколько деталей к уже имеющейся конструкции, чтобы получилась модель «Котик». Последовательность сборки и выполняемых при этом сборочных операций показана на рисунках 2.3.6 — 2.3.13.
Фактически это ваш первый опыт сборки модели, поэтому требуются небольшие пояснения, как пользоваться схемами сборки моделей «Эвольвектор». Эти схемы частично представлены в данном учебнике, но основная их масса собрана в отдельном методическом пособии, которое является приложением к основному учебнику.
Процесс сборки любой модели состоит из этапов. Этапом может являться отдельная сборочная операция, посредством которой очередная деталь прикручивается к общей конструкции. А может быть и сборка узла, состоящего из нескольких сборочных операций. Но в любом случае сборка любой машины и робота в частности представляет собой последовательность сборочных операций.
Под сборочной операцией понимается прикручивание одной детали к другой детали или узлу с помощью крепежа.
Если детали однотипные и их крепление к другой детали или узлу идентично, то такое крепление сразу нескольких одинаковых деталей может быть отнесено к одной сборочной операции.
Для каждой операции в рамках схемы сборки приводятся:
- Перечень деталей, которые необходимы для выполнения этой операции.
- В случае необходимости - особые указания, на что надо обратить внимание при соединении деталей.
- Пиктограммы действий, которые необходимо выполнить при реализации сборочной операции и с помощью какого инструмента.
- Изображение соединяемых деталей до выполнения операции и после.
Пояснения по перечисленным элементам схемы сборки представлены на рисунке 2.3.6. В дальнейших проектах схемы сборки будут оформляться точно так же.
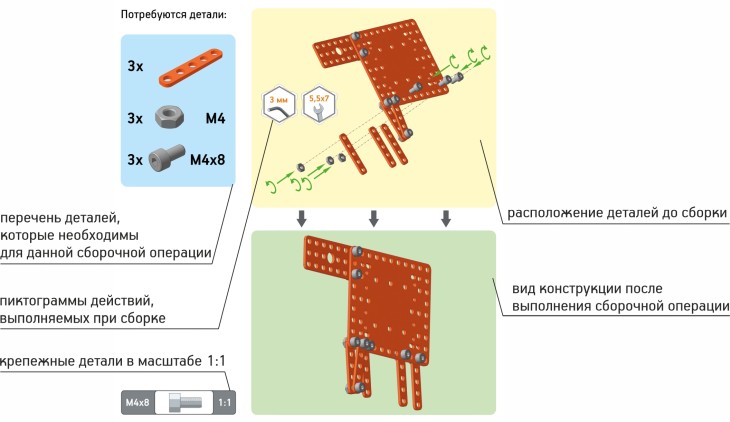
Рис. 2.3.6. Сборочная схема крепления 1-й детали с пояснениями по элементам схемы
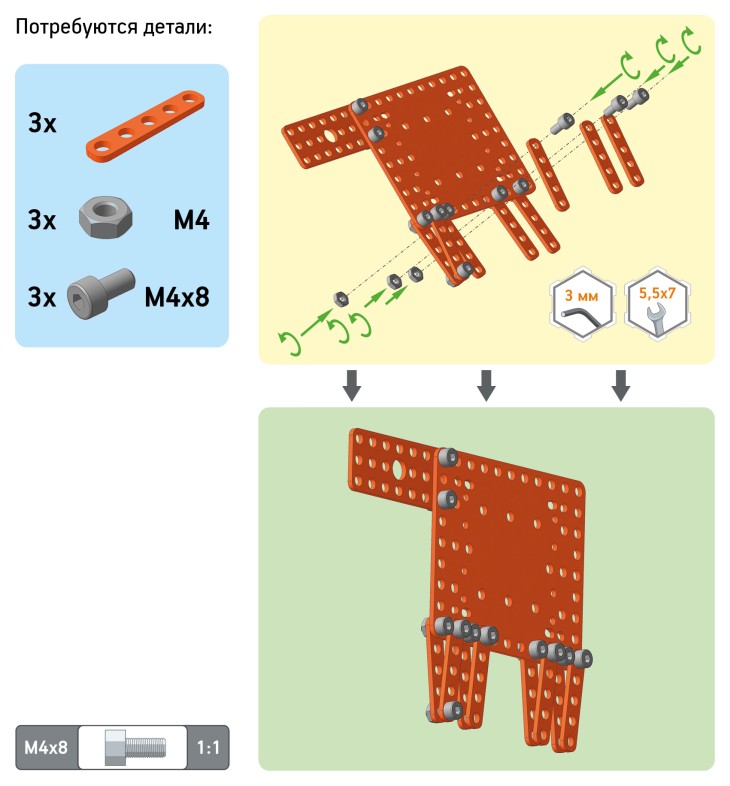
Рис. 2.3.7. Крепление второй детали к «туловищу, для остальных лап
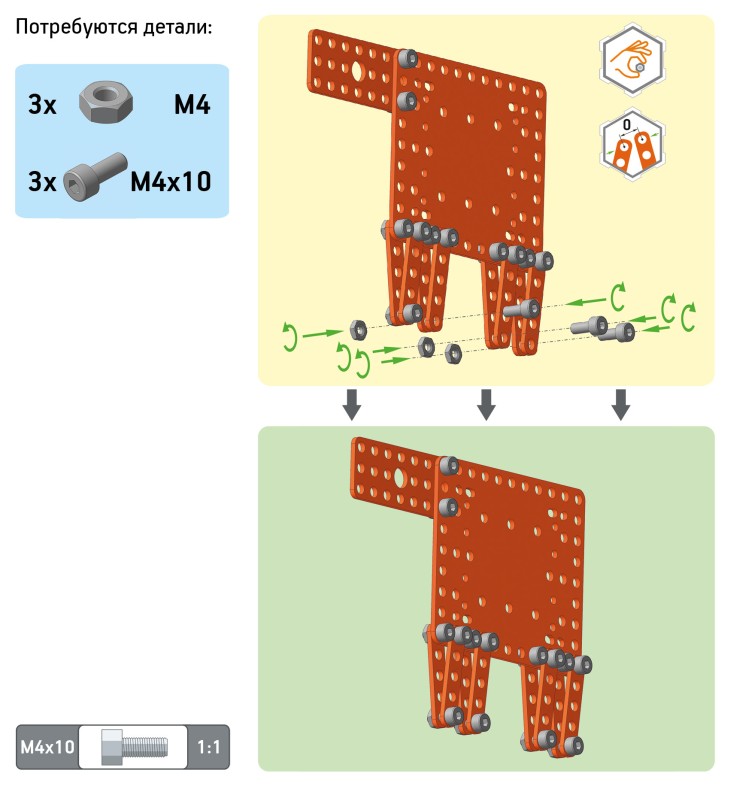
Рис. 2.3.8. Соединение деталей «лап» между собой
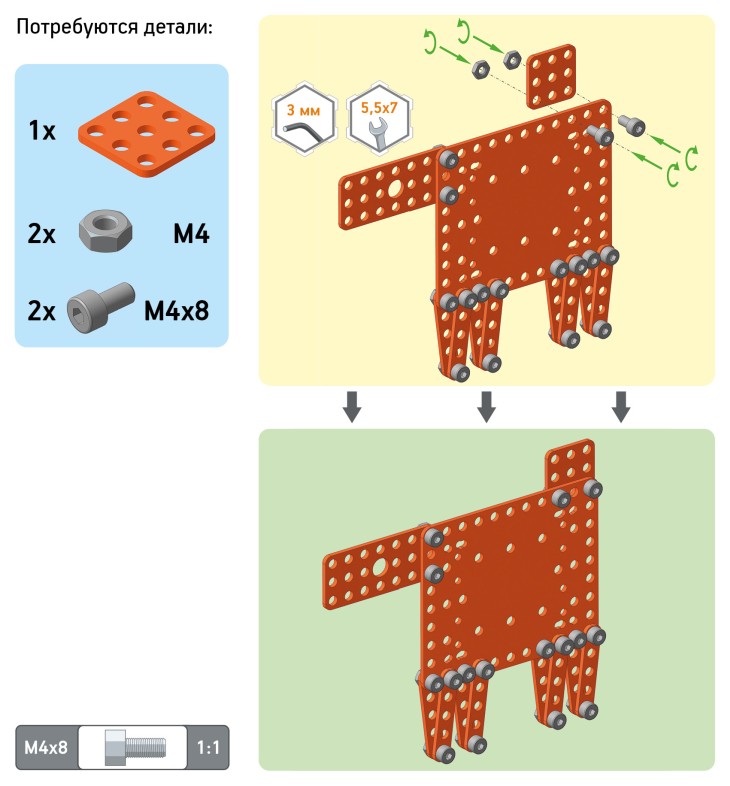
Рис. 2.3.9. Соединение шеи с туловищем
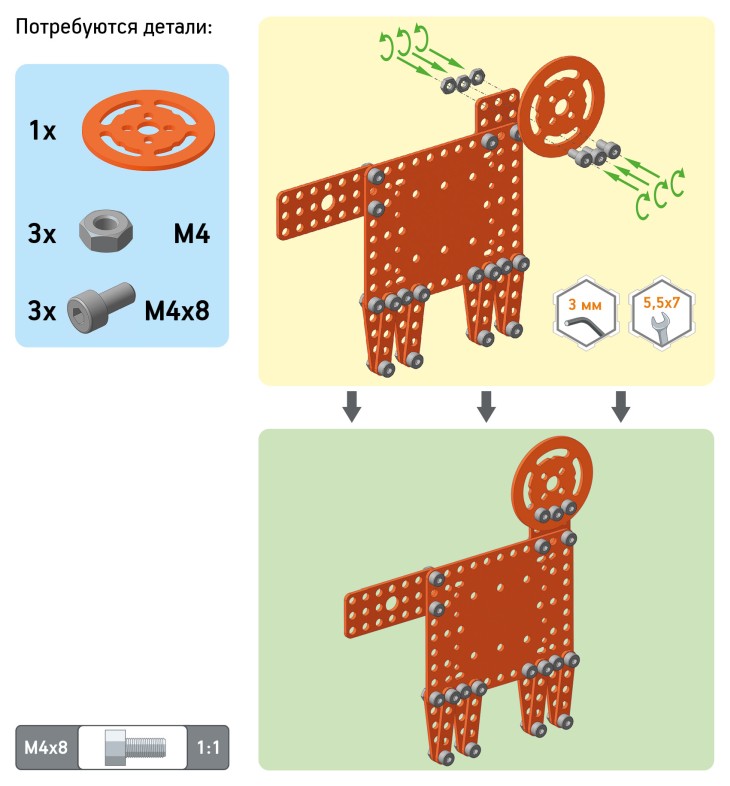
Рис. 2.3.10. Монтаж «головы» на «шею»
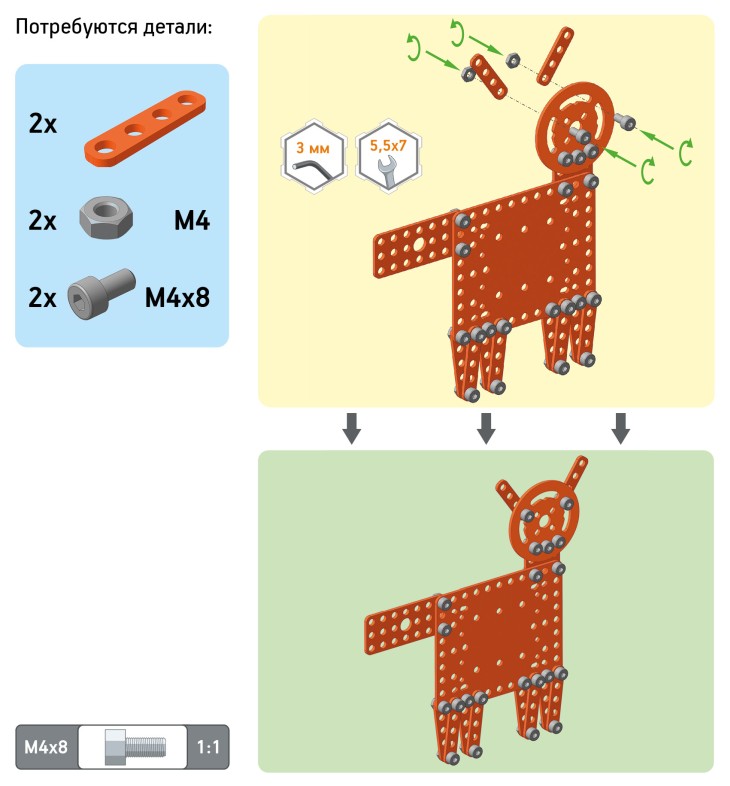
Рис. 2.3.11. Крепление 1-й детали «ушей» к «голове»
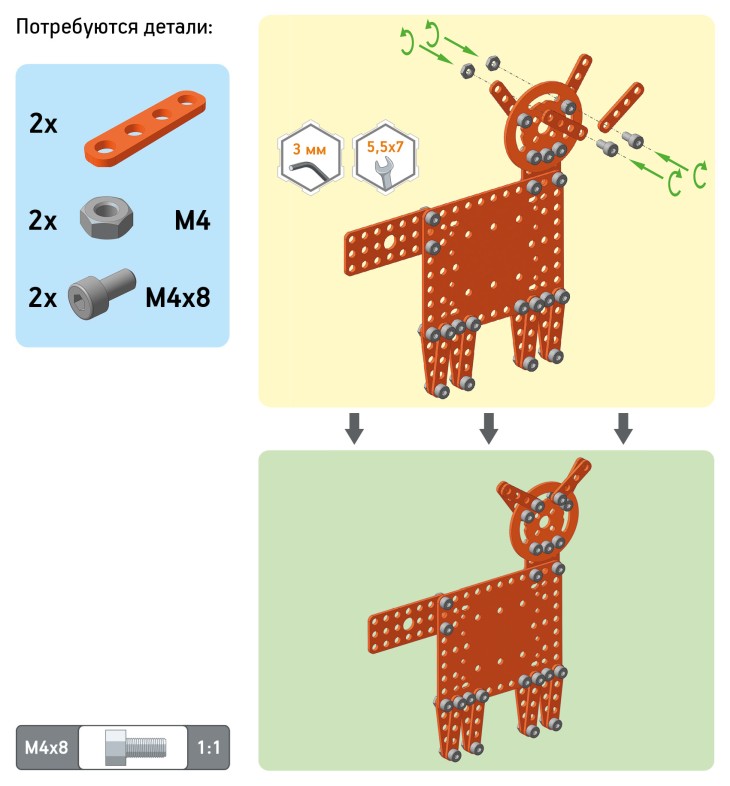
Рис. 2.3.12. Досборка «ушей»
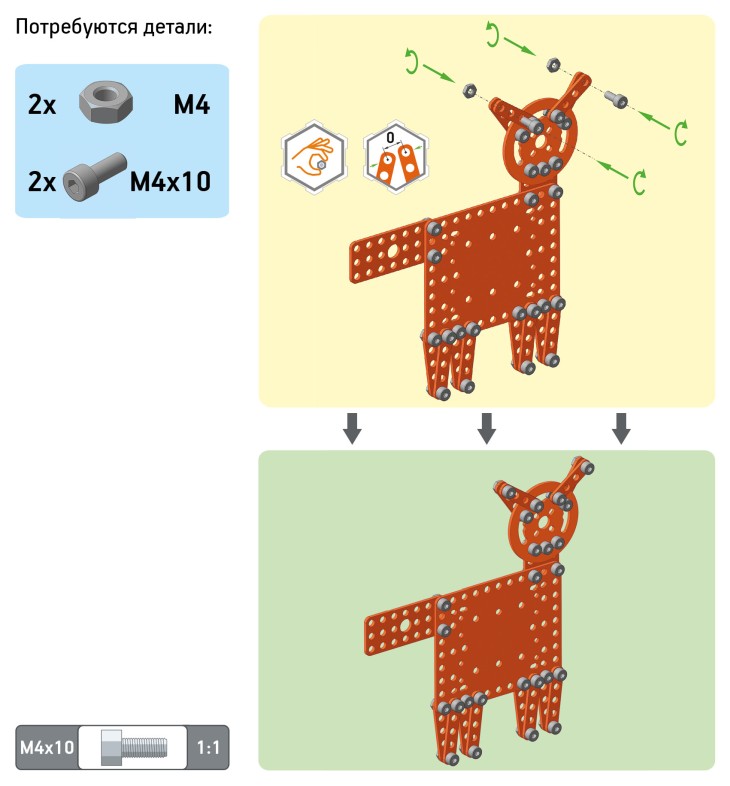
Рис. 2.3.13. Завершение сборки «ушей»
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: