


Плата расширения «Разъемы ВЕРТОР 2.0» V1.1

Технические данные и краткое руководство пользователя
1. Назначение устройства
Плата расширения «Разъемы ВЕРТОР 2.0» (Рис.1.1) предназначена для использования в школьной и кружковой проектной деятельности при создании различных электронных устройств в области автоматики и робототехники.Она обеспечивает совместимость оснащенных разъемами типа RJ электронных модулей системы ВЕРТОР 2.0 с классическими контроллерами Arduino и, в частности, с контроллерами «Вертор Классик», «Вертор Базис» и «Вертор JS». Для этой цели она оснащена девятью разъемами для подключения различных элементов системы модульной электроники ВЕРТОР 2.0.
Благодаря данной плате расширения становится возможным подключение к контроллеру модулей в виде датчиков и исполнительных устройств с помощью кабелей. Это решение помогает сделать процесс конструирования электронных систем управления на основе классических контроллеров быстрым и безошибочным. Что, в свою очередь, позволяет в большей степени сосредоточиться на программировании и сборке механических конструкций в процессе выполнения образовательных проектов.
Помимо этого, благодаря наличию на плате колодок, сохраняется возможность подключения электронных компонентов или модулей посредством штырьковых проводов и макетной платы.
Плата расширения разработана и произведена в рамках образовательного направления «Эвольвектор Умные Контроллеры», входящего в концепцию «Эвольвектор Умный Мир».
Рис.1.1
2. Конструкция и назначение выводов (контактов)
Расширение «Разъемы ВЕРТОР 2.0» выполнено в виде печатной платы, которая оснащена набором функциональных элементов, показанных на рисунке 2.1.
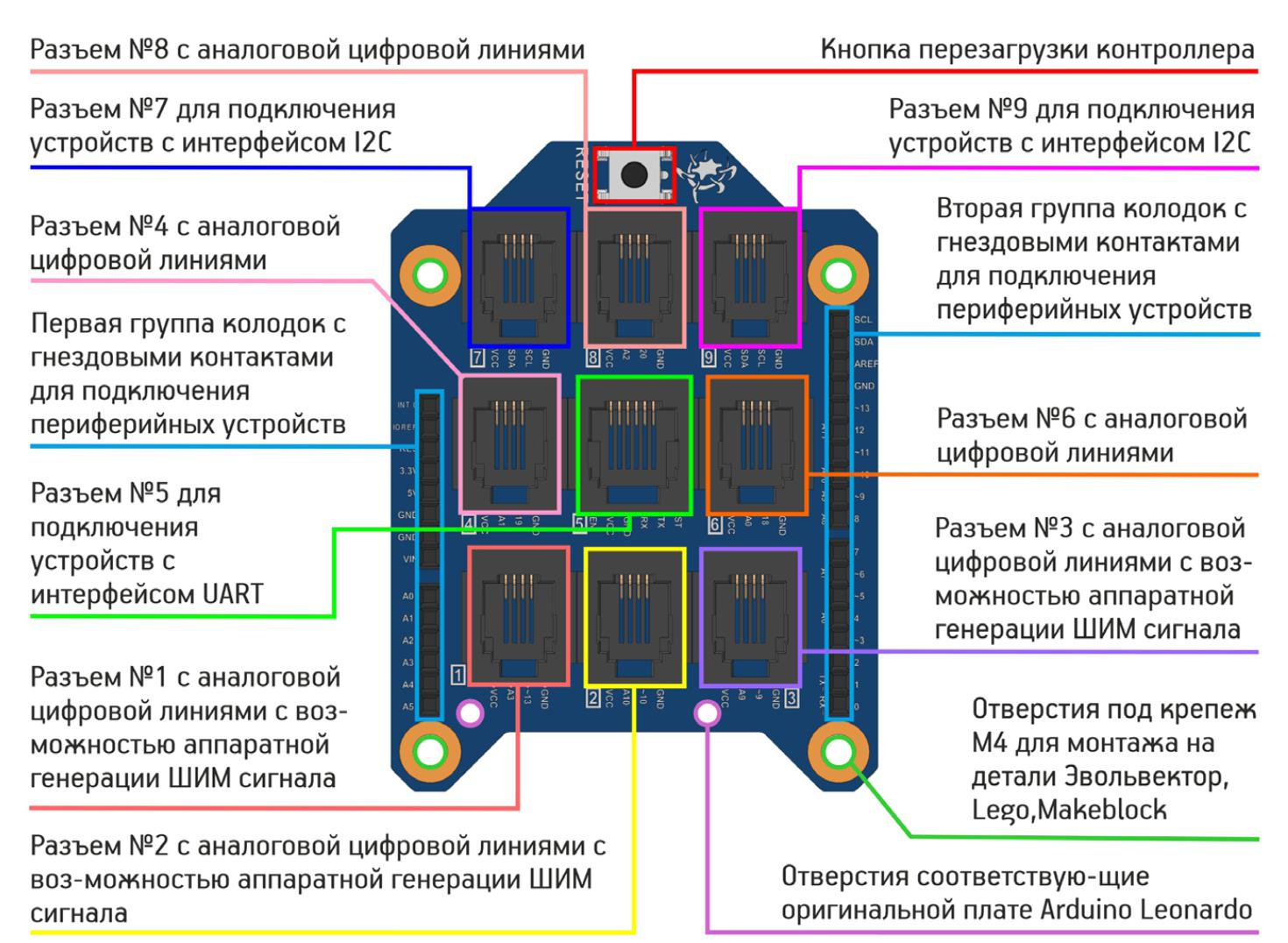
Рис.2.1
- Две группы колодок с гнездовыми контактами для подключения компонентов в процессе сборки устройств с помощью макетной платы;
- Кнопка принудительной перезагрузки подключенного контроллера;
- Разъемы № 1, 2, 3 с аналоговой и цифровой линиями с поддержкой аппаратной генерации ШИМ сигнала;
- Разъемы № 4, 6, 8 с аналоговой и цифровой линиями;
- Разъем № 5 для подключения устройств с интерфейсом UART;
- Разъемы № 7, 9 для подключения устройств с интерфейсом I2C;
- Отверстия под крепеж М4 для монтажа на детали Эвольвектор, Lego, MakeBlock;
- Крепежные отверстия, совместимые с оригинальной платой Arduino Leonardo.
На рисунке 2.2 указаны габаритные размеры, а также расположение и размеры крепежных отверстий как стандартных (соответствующих оригинальной плате Arduino Leonardo), так и для крепления к деталям конструктора «Эвольвектор», Lego и Makeblock с межосевым расстоянием, кратным 8 мм.

Рис.2.2
Важно отметить, что аналоговая и цифровая линии разъемов № 2, 3, 4, 6, 8 физически объединены и их назначение определяется подключенным к ним устройством. Например, при подключении кнопки линия настраивается, как цифровой вход. При подключении светодиода – также в качестве цифрового выхода. А вот при подключении потенциометра – уже как аналоговый вход.
Следует иметь ввиду, что такая особенность указанных разъемов не допускает подключения к ним тех модулей системы электроники ВЕРТОР 2.0, для работы с которыми одновременно используются обе линии разъема. Примером является модуль ультразвукового дальномера. Его подключение возможно только к разъему № 1, имеющему отдельную цифровую линию 13 и аналоговую А3.
3. Принцип работы
Плата расширения устанавливается на контроллер путем помещения штырей в гнезда колодок контроллера. Для надежного крепления можно использовать винты с втулками в качестве проставок или стойки. После установки пины контроллера оказываются соединенными с соответствующими линиями разъемов на плате расширения.
Далее к разъемам платы могут подключаться модули с помощью специальных кабелей. Управление ими осуществляется в соответствии с их документацией через выполнение программы, загруженной в контроллер.
Каждый разъем на плате имеет 4 контакта в соответствии с общей концепцией системы модульной электроники « ВЕРТОР 2.0»:
- «плюс» питания (VCC);
- аналоговая линия;
- цифровая линия;
- «минус» питания (GND).
В целях размещения на плате максимального количества разъемов, а также для обеспечения совместной работы платы с платой расширения «Привод Классик 2.0» аналоговая и цифровая линии физически объединены на большинстве разъемов. Отдельные сигнальные линии имеет только разъем №1.
Таким образом, со стороны контроллера линиями каждого разъема управляет один контакт с колодки, который может работать как в аналоговом, так и в цифровом режимах. Это дает возможность подключать к данным разъемам как цифровые, так и аналоговые модули. Подавляющее большинство электронных модулей системы « ВЕРТОР 2.0» для передачи данных использует только одну линию, поэтому описанная схема подключения модулей к плате расширения является оптимальной.
Важно отметить, что концепция системы модульной электроники « ВЕРТОР 2.0» предусматривает одновременное использование плат расширения «Привод Классик 2.0» и «Разъемы ВЕРТОР2.0». Установив на контроллер первую плату, а на нее вторую, можно получить возможность одновременного управления как приводами, так и модулями датчиков, либо индикаторов. Поэтому у платы расширения «Привод Классик 2.0» для управления электродвигателями и сервоприводами используются другие сигнальные контакты контроллера, нежели для подключения электронных модулей «Разъемы ВЕРТОР 2.0». Данная возможность одновременного использования двух плат востребована при выполнении проектов по автоматике или робототехнике.
Если плата расширения используется в проекте, то при программировании контроллеров, с которыми она соединена, следует иметь ввиду, что обозначение выводов платы расширения совпадает только с обозначениями контактов в контроллерах «Вертор Классик V2.1» и «Вертор Базис V2.1.4». На рисунке 3.1 приведены данные обозначения контактов при программировании указанных контроллеров.
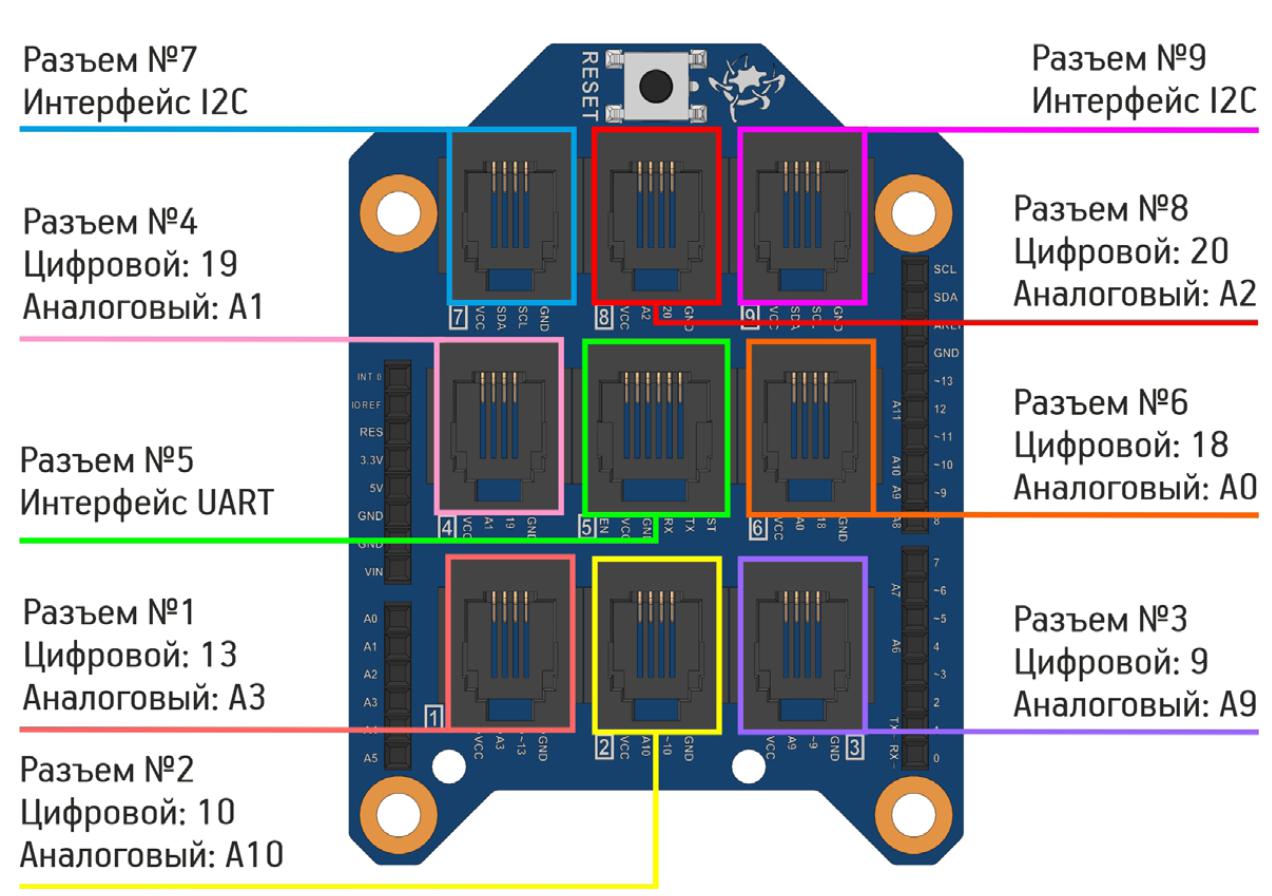
Рис.3.1
В случае использования платы расширения совместно с контроллером «Вертор JS» обозначения отличаются. Обозначения линий для управления разъемами на плате расширения при программировании данного контроллера в среде Espruino IDE указаны на рисунке 3.2.

Рис.3.2
4. Выполнение проектов с использованием платы расширения
Компания «Эвольвектор» рекомендует выполнять образовательные проекты на основе своих электронных модулей (с использованием платы расширения в частности) в соответствии с методикой ТРИЗ (Теория Решения Изобретательских Задач). Она заключается в том, что каждый проект реализуется последовательно в несколько четко очерченных этапов.
4.1 Определение и описание практической задачи.
Для того, чтобы собрать устройство с использованием платы расширения, необходимо понимать для решения какой задачи осуществляется ее сборка и как оно будет функционировать.
4.2 Проектирование конструкции устройства для решения поставленной задачи.
Плата расширения применяется только совместно с контроллерами и расширяет их функциональные возможности. Поэтому требуется выбрать контроллер, наиболее подходящий для решения задачи. Помимо этого необходимо подобрать подключаемые к плате модули, которые позволят собирать информацию (датчики) или исполнять действия, при наличии механической части определить механизмы, необходимые для решения задачи.
4.3 Составление алгоритма работы устройства
Для последующего программирования и настройки устройства необходим план действий, которые будет выполнять устройство в целях решения поставленной задачи. Здесь должны быть определены разъемы платы расширения, к которым будут подключаться модули, характер исвойства сигналов, которые будут приходить на них, обрабатываться и отправляться на исполнительные устройства. Разумеется, алгоритм составляется на основании спроектированной конструкции и особенностей поставленной задачи.
4.4 Сборка устройства
После определения конструкции и формирования алгоритма работы устройства его необходимо собрать. В рамках сборки плата расширения устанавливается на контроллер с помещеннием штырей платы в гнезда контроллера. Благодаря несимметричному расположению штырей, неверная установка платы на контроллер исключена. Исходя из спроектированной конструкции контроллер с платой и подключаемые модули могут быть закреплены на вспомогательных деталях или механизмах. После чего необходимо выполнить подключение элементов электронной системы друг к другу в соответствии с алгоритмом.
4.5 Программирование устройства
Собранное устройство не сможет выполнить задачу, если не будет запрограммировано. Поэтому на данном этапе необходимо написать программу в соответствии с ранее сформированным алгоритмом, чтобы через разъемы платы расширения принимались или передавались требуемые сигналы. При этом, обращение к линиям разъемов платы расширения в программе должно выполняться с учетом обозначений подключенных к ним контактов контроллера, которые показаны на рисунке 3.1 и рисунке 3.2.
Средство создания программы целиком определяется контроллером, совместно с которым применяется плата расширения. Для «Вертора Классика» и «Вертора Базиса» это может быть Arduino IDE. Для «Вертора JS» такой средой выступает Espruino IDE. Помимо этого все перечисленные контроллеры также могут программироваться в блочно-графической среде «Студия Эвольвектор».
4.6 Проверка выполнения задачи устройством и доработка при необходимости
Завершающим этапом работы над устройством является тестирование его работы и выявление недостатков или ошибок с последующим их устранением.
Дополнительную информацию о принципах работы с платой расширения и примеры проектов, сделанных на ее основе по методике ТРИЗ, Вы можете найти в учебных пособиях к конструкторам «Эвольвектор» или на сайте академии «Эвольвектор».
5. Технические характеристики
| Наименование характеристики | Значение |
| Размеры платы | 57х76 мм |
| Общее количество разъемов для подключения модулей, из которых: | 9 |
| С поддержкой ШИМ | 3 |
| С возможностью принимать аналоговый сигнал | 6 |
| С интерфейсом I2C | 2 |
| С интерфейсом UART | 1 |
| Наличие кнопки принудительной перезагрузки контроллера | Да |
| Номинальное рабочее напряжение платы | 3-5 В |
6. Условия гарантии
ООО «Эвольвектор» гарантирует работоспособность контроллера на протяжении 12 месяцев с момента приобретения устройства, при условии, что плата в течение указанного срока не получала механических повреждений и не выведена из строя в результате ошибочных действий пользователя.
По вопросам гарантийного обслуживания, а также по всем техническим и информационным вопросам можно обращаться на электронную почту info@evolvector.ru, help@evolvector.ru, а также по телефону +7 (499) 391-01-05. Адрес для корреспонденции: 143300, Московская область, г. Наро-Фоминск, ул. Московская, д.15.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: