


§ 1.3 Из чего состоит робот?

Любой робот — это сложная машина. Даже если он самый простой по конструкции, он все равно сложный. Слово «сложный» в русском языке произошло от слова «сложение». Вот и робот сложен из набора составных частей. Причем набор этот принципиально одинаков для всех роботов. Давайте заглянем внутрь того же робота-пылесоса, чтобы разобраться, что это за части.
Если разобрать автоматический пылесос, то можно увидеть ряд характерных элементов, из которых он состоит (Рис. 1.3.1).
 |
| Рис. 1.3.1. Робот-пылесос в частично разобранном виде |
Контейнер для мусора легко вытаскивается нажатием на специальную кнопку. Затем откручиваются винты и снимается бампер с крышкой корпуса. Остается корпус (выполняет роль каркаса, задающего форму робота) с установленными в нем системой управления и исполнительными механизмами, обеспечивающими работу робота-пылесоса.
На рисунке 1.3.2 обозначены составные части робота, установленные непосредственно в корпусе. На картинке надо исправить слово «индикаций»
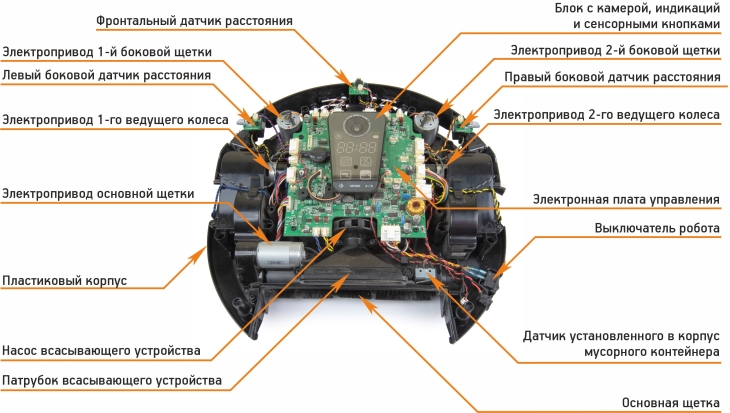 |
| Рис. 1.3.2. Ключевые элементы робота и исполнительные механизмы, обеспечивающие его работу |
Это, прежде всего, закрепленные в корпусе электродвигатели, которые по-другому еще называются электромоторами. Роботу для уборки необходимо ездить по полу, вращать щетками и всасывать пыль. Он представляет собой электрическую машину, а значит для его движения и работы исполнительных механизмов необходимо что-то, что позволяет преобразовывать электрическую энергию в энергию механического движения. В качестве таких преобразователей выступают электродвигатели. Именно они приводят в движение колеса робота и его щетки.
Еще, конечно же, можно видеть электронную печатную плату, занимающую половину внутреннего пространства корпуса. Она представляет собой контроллер, в который загружена программа работы робота. На ней сверху закреплен блок, включающий в себя видеокамеру, световые индикаторы и сенсорные кнопки для выбора режимов работы робота. Также к контроллеру подключены оптические датчики расстояния, расположенные по периметру внешней стороны корпуса (рис. 1.3.3) и в нижней его части (рис. 1.3.4). Датчики и камера обеспечивают так называемое техническое зрение машины. С его помощью она адаптируется к окружающим условиям. Плата контроллера, датчики и камера в совокупности составляют систему управления робота.
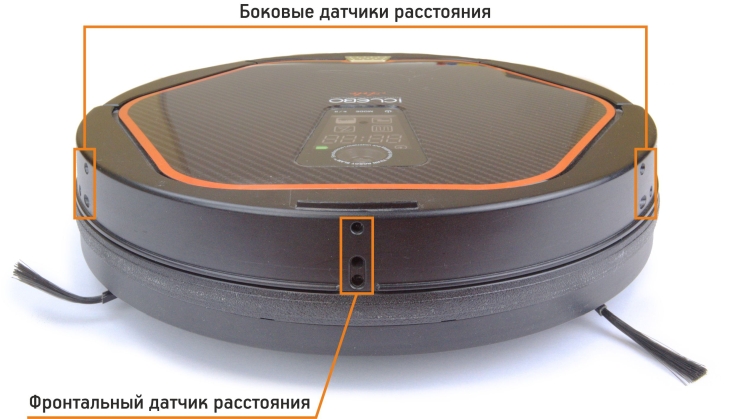 |
| Рис. 1.3.3 Датчики расстояния установлены в боковой части корпуса. |
В нижней части робота можно увидеть колеса, с помощью которых пылесос перемещается по полу, и отсек с аккумуляторной батареей питания под крышкой (рис. 1.3.4).
 |
| Рис. 1.3.4. Колеса, датчики и отсек с аккумуляторной батареей для питания робота электричеством в нижней части корпуса. |
Таким образом, по результатам анализа конструкции можно выделить 3 основные составные части робота, которые содержат в себе еще несколько элементов. Для наглядности они изображены в виде схемы (рис. 1.3.5).
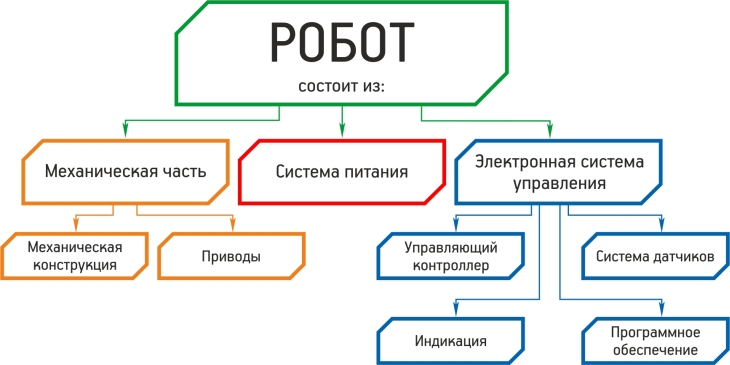 |
| Рис. 1.3.5 Основные составные части, из которых должен состоять робот, чтобы он смог выполнить вверенную ему физическую работу. |
В зависимости от типа робота или его назначения отдельные элементы могут присутствовать или отсутствовать, но неизменно всегда наличие механической конструкции, системы управления и источника питания. И при создании робота очень важно соблюдение баланса между этими составными частями. Они должны соответствовать друг другу, чтобы робот успешно выполнял поставленные перед ним рабочие задачи. Они же полностью определяют то, как робот будет работать, управляться или настраиваться. Поэтому о каждой из них следует поговорить отдельно.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: