


Проект №5 «Кнопконажиматель»

Карлсон — представляет собой персонаж хитрый, любящий пошалить и полукавить. В сказке он постоянно пытался обхитрить Малыша, чтобы получить от него сладости, которые, как известно, являются топливом для моторчика пропеллера.
На его хитрость можно ответить другой хитростью – технической. Она будет состоять в том, что мы можем сделать для кнопки механический нажиматель, который будет работать в автоматическом режиме. Он сможет нажимать кнопку каждый раз после того, как моторчик останавливается, а светодиодные глаза потухают, чтобы снова запустить процесс их работы.
Для конструирования нажимателя понадобится еще одна разновидность привода - серводвигатель. Он позволяет точно управлять углом поворота его выходного вала. В зависимости от сигнала с контроллера, вал поворачивается на нужный угол и удерживает его.
Этот привод необходимо закрепить на Робокарлсоне и запрограммировать контроллер так, чтобы как только мотор остановится, привод с помощью толкателя снова аккуратно нажмет на кнопку. Постоянно и без устали. Как и подобает руке робота.


Конструкция
Для того, чтобы механизм кнопконажимателя эту самую кнопку не сломал, а нажимал на нее аккуратно, - необходимо сделать его точным. Он должен четко поворачивать нажиматель на тот угол, который необходим для нажимания на кнопку.
Обычный мотор-редуктор для этой цели использовать невозможно. Он либо стоит на месте, либо бесконтрольно вращается. По-другому он работать не умеет. А вот такая разновидность приводов, как серводвигатель - вполне. Сервопривод как раз заточен под то, чтобы поворачивать свой выходной вал точно на тот угол, который требуется для работы механизма, приводимого в движение этим приводом. К примеру, вы задаете угол 90 градусов. Сервопривод поворачивает свой вал на данный угол и останавливается. Сохранять это угловое положение он будет до тех пор, пока не получит команду на другой угол, в который должен установиться вал.
В результате в данном проекте к уже имеющейся конструкции Робокарлсона необходимо добавить сервопривод, прикрепить его к корпусу с помощью кронштейна, прикрутить нажиматель и всё настроить.
Алгоритм
Алгоритм проекта строится на основе алгоритма из проекта предыдущего.В его основе лежит все то же плавное задухание светодиодов и постепенная остановка пропеллера. Но к данным действиям добавляется поворот серводвигателя на угол, соответствующий нажатию на кнопку.
В итоге получается следующая последовательность действий. Серводвигатель поворачивает нажиматель и нажимает на кнопку, после чего нажиматель возвращается в начальное положение. Проверка нажатия на кнопку показывает, что кнопка нажата и запускается алгоритм из прошлого проекта с включением глаз и мотора, и последующим их затуханием. Как только мотор останавливается — алгоритм возвращается в начало и все повторяется снова.
Сборка
Целью данного проекта является знакомство с серводвигателем, как с разновидностью приводов, широкоприменяемых в робототехнике.
Соберите конструкцию согласно следующим ниже схемам сборки и наблюдайте за тем, как отрабатывает серводвигатель заложенный в программе алгоритм.
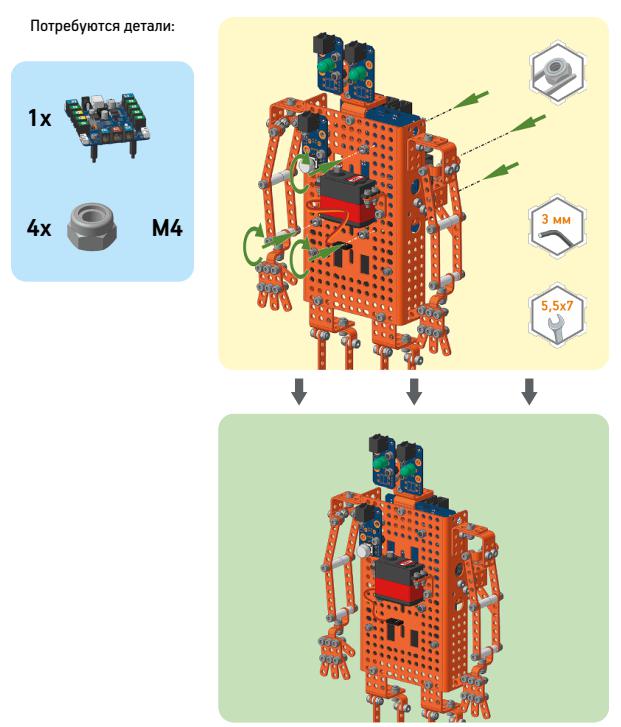
1. Отключение модулей от контроллера и демонтаж контроллера для закрепления кронштейна серводвигателя
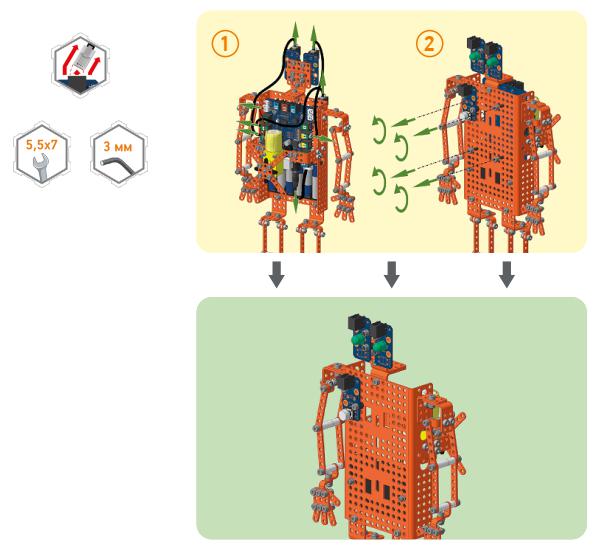
2. Установка привода кнопконажимателя
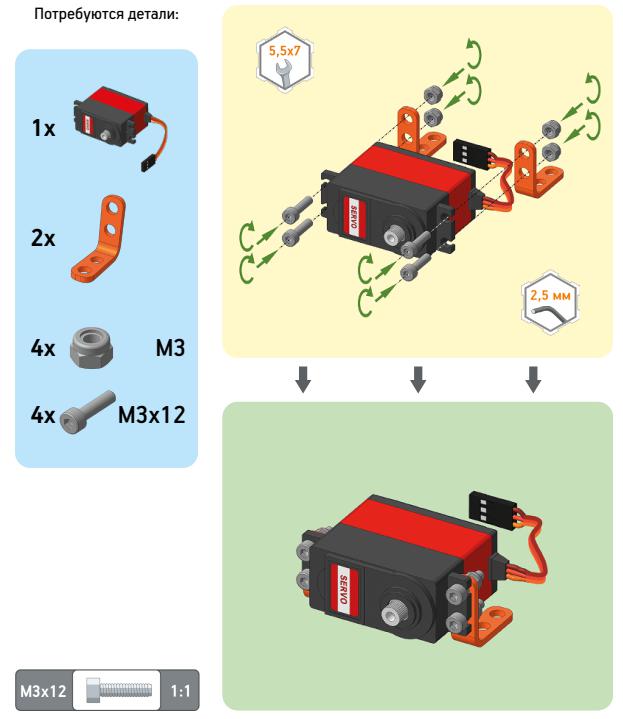
2.1 Крепление к приводу уголков, выполняющих роль кронштейна
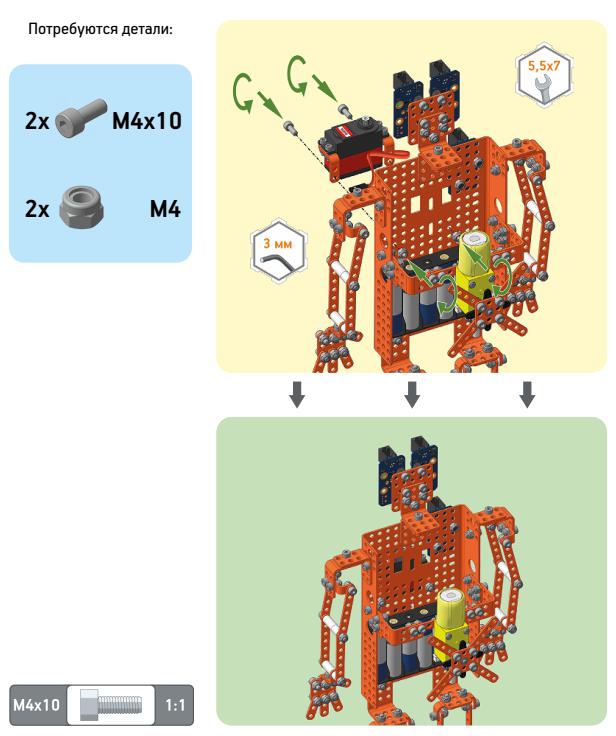
2.2 Установка привода на корпус
2.3 Возвращение на корпус контроллера
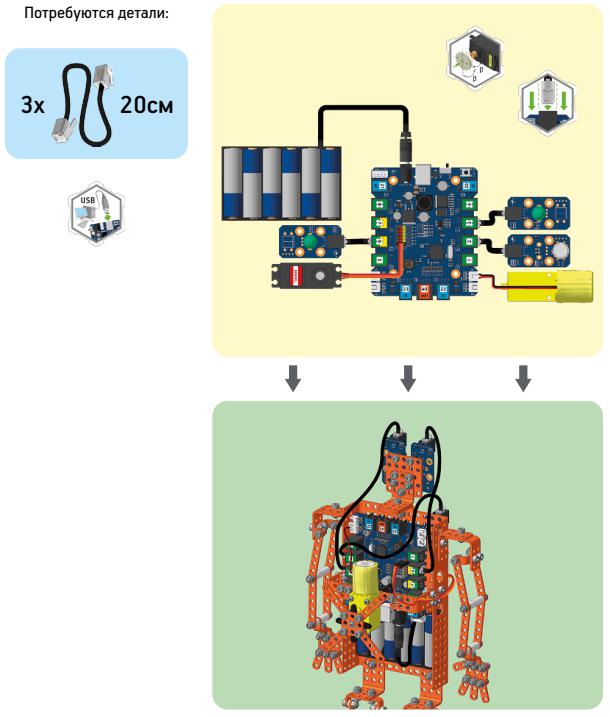
3. Подключение электронных модулей и сервопривода к контроллеру
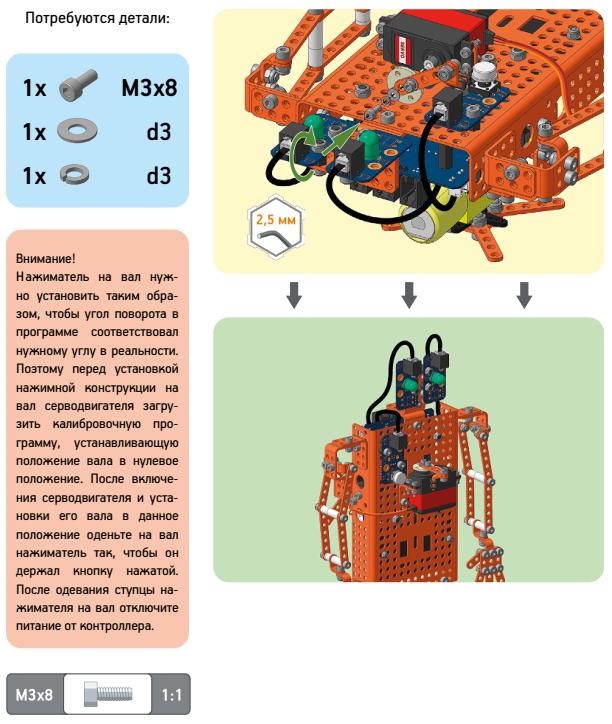
4.Сборка нажимателя и его установка на вал серводвигателя
4.1 Сборка нажимателя
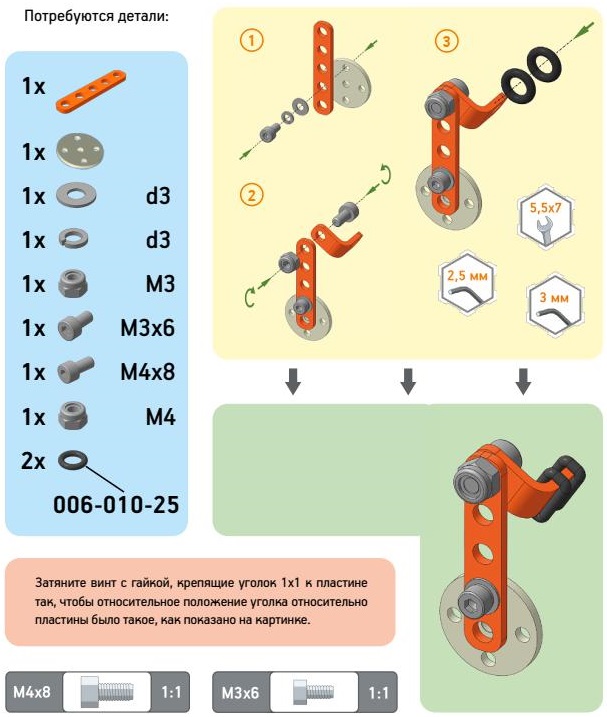
4.2 Сборка нажимателя
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
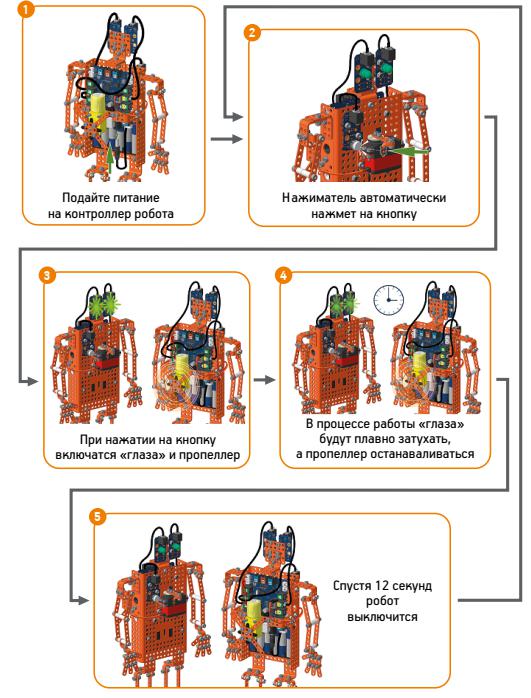
Традиционно необходимо проверить всё ли работает так, как было запланировано. Подайте питание на робота после загрузки программы и проконтроллируйте, что нажиматель работает исправно.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: