


Проект №3 «Робокарлсон»

В середине прошлого века шведская писательница Астрид Линдгрен написала сказочную трилогию «Малыш и Карлсон, который живет на крыше», ставшую впоследствии мировым бестселлером. По мотивам этого литературного произведения чего только не было выпущено и снято. Множественные мультфильмы, спектакли, художественные фильмы и даже компьютерная игра.
Огромному количеству людей и, прежде всего, детям полюбился главный персонаж Карлсон за свой непосредственный юмор, непредсказуемость и оригинальный внешний вид. И он — отличная идея для очередного проекта, в рамках которого можно изучить принципы управления электродвигателем.
Конструкция
У оригинального Карлсона был пропеллер, который вращался по желанию персонажа. Для того, чтобы приводить лопасти в движение, нужен моторчик, о чем иногда говорил сам сказочный герой.
Наш робот питается от электричества, следовательно для привода пропеллера удобно использовать маленький электродвигатель. А чтобы его вал в целях безопасности вращался не очень быстро, лучше использовать мотор-редуктор — привод, состоящий из электродвигателя и редуктора, помещенных в единый корпус. Редуктор позволяет преобразовать высокую скорость вращения вала электромотора в более низкую скорость вращения вала редуктора.
Для модели робокарлсона будем использовать мотор-редуктор в пластиковом корпусе с валом редуктора, выходящим на одну сторону. Он рассчитан на питание напряжением 6 В, ровно таким же, какое выдает контроллер Вертор Стандарт. Для подключения к контроллеру у него имеется кабель, оснащенный на конце двухконтактным штекером, который вставляется в соответствующий разъем на плате контроллера.
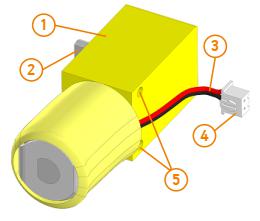
1. Пластиковый корпус
2. Выходной вал редуктора
3. Кабель для подключения к контроллеру
4. Штекер
5. Отверстия для крепления
Ну и для того, чтобы модель стала Робокарлсоном, необходимо закрепить на него пропеллер, а мотор-редуктор на туловище робота. Сам пропеллер можно собрать из пластин, а зафиксированить на валу с помощью качалки от серводвигателя. К корпусу мотор-редуктор может быть закреплен посредством винтов и вспомогательных деталей.
Также понадобится модуль с кнопкой, с помощью которой робота можно будет запускать и который можно закрепить на передней части туловища, как у сказачного героя.
Алгоритм
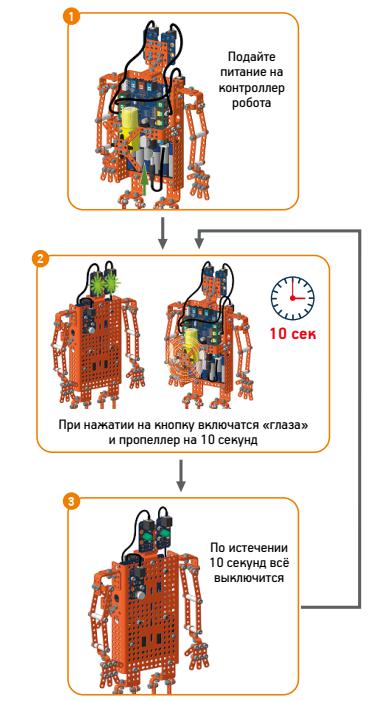
Вот тут уже алгоритм будет более сложный, поскольку в данном проекте возникает пусть и простой, но все же диалог с человеком. Робот будет включаться с помощью кнопки, поэтому необходимо проверять условие ее нажатия. Если кнопка не нажата, то робокарлсон отключен. В противном случае будут включаться моторчик и «глаза».
Чтобы надо было периодически нажимать кнопку, сделаем так, чтобы робот работал на протяжении 10 секунд и отключался до тех пор, пока кнопка не будет нажата снова.
Сборка
Выполните сборочные операции, которые необходимы для преобразования модели в робокарлсона. Обратите внимание на то, как выполняется управление мотор-редуктором с помощью контроллера.
1 Подготовка робота к установке моторчика с пропеллером
1.1 Отключение модулей и питания от контроллера
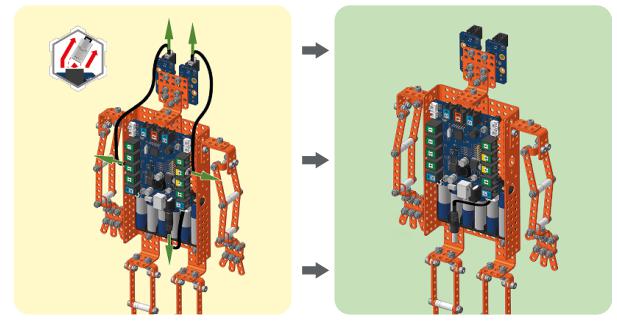
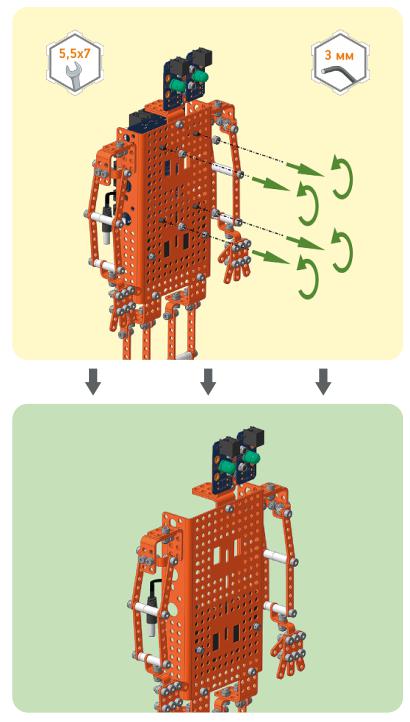
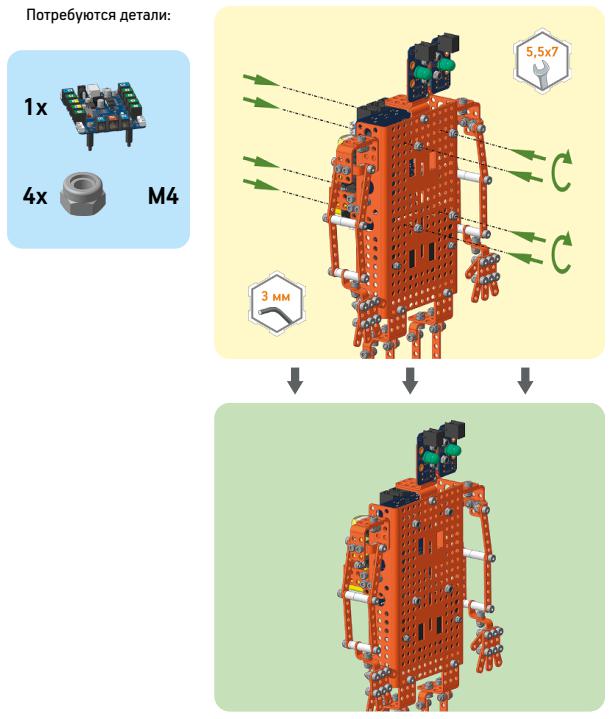
1.2 Демонтаж контроллера, чтобы можно было закрепить держатель мотора
2 Установка привода пропеллера на робота
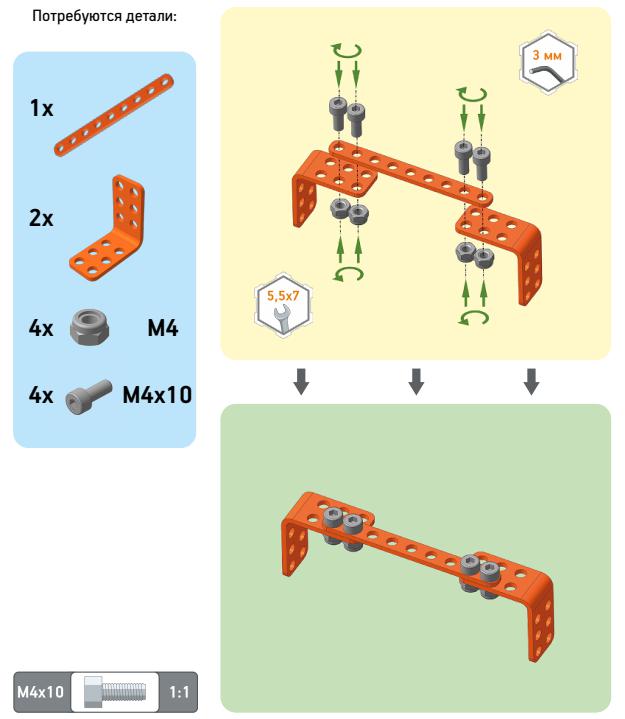
2.1 Соединение уголков с поперечной пластиной
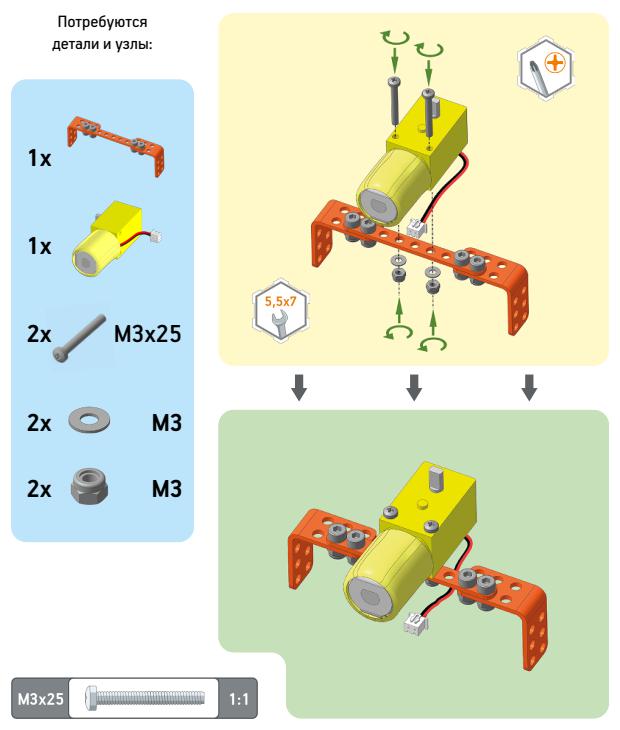
2.2 Крепление мотор-редуктора к пластине
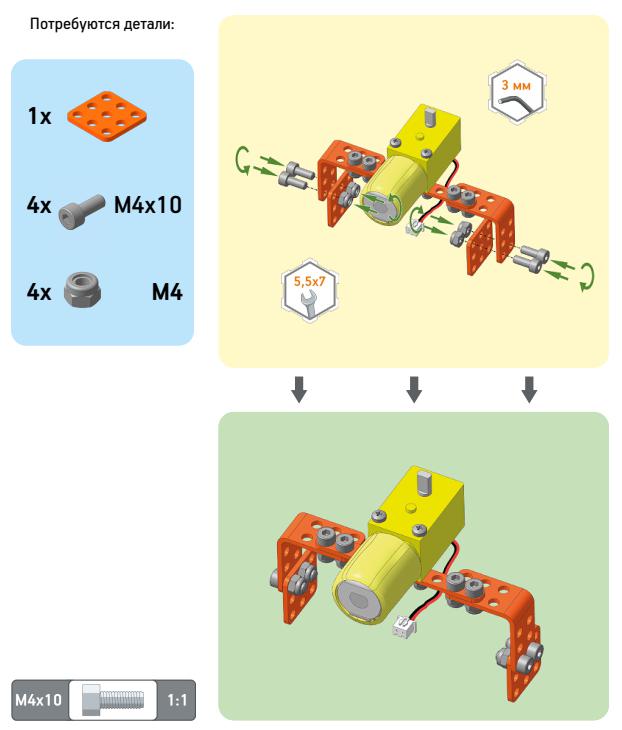
2.3 Монтаж переходных пластин
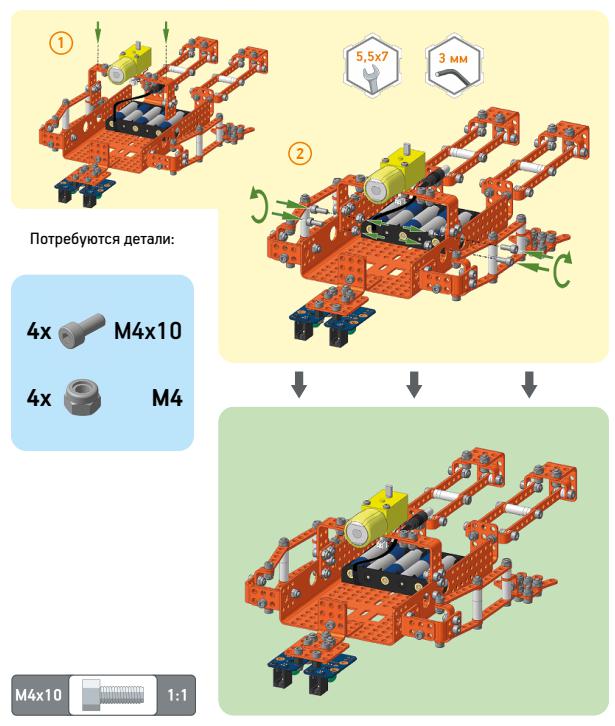
2.4 Крепление собранной конструкции к корпусу робота
3 Повторное крепление контроллера
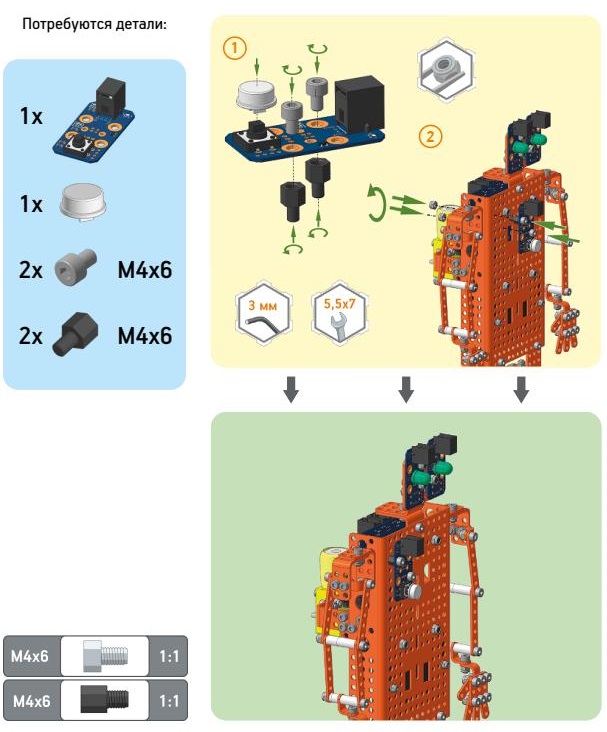
4 Установка тактовой кнопки
5. Сборка и монтаж пропеллера на мотор-редуктор

6. Подключение электронных модулей и источника питания к контроллеру, загрузка программы
6
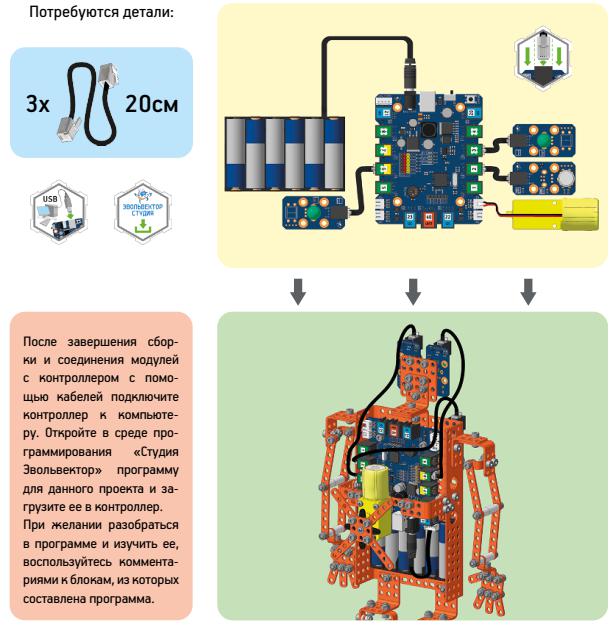
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
Проверьте правильность выполнения проекта. Робот должен работать по алгоритму, показанному ниже на графической схеме.
1.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: