


Проект №13 «Фототаксис»

Летом вы наверняка замечали, что в темное время суток различные насекомые частенько летят на источники света. В качестве них могут выступать дорожные фонари, освещающие улицу, и пешеходные переходы.Бабочки и мотыльки подлетают к ним и вьются вокруг. Либо насекомые могут лететь на свет фар автомобилей. Таким везет меньше, поскольку встреча с движущимся транспортом не сулит для них ничего хорошего.
Эта модель поведения насекомых получила название фототаксис. Она до сих пор не имеет научно доказанного объяснения. Несмотря на многолетние исследования, пока существуют лишь гипотезы по этому поводу.
Наиболее правдоподобное предположение на сей счет в 1967 году высказал русский ученый Владимир Борисович Чернышёв. Оно состоит в том, что у насекомого, ослепленного ярким светом, возникает реакция бегства от возможной опасности. В норме эта реакция автоматически направлена в сторону света, потому что он ассоциируется с открытым пространством, куда насекомые летят в случае опасности. Таким образом, получается интересная штука: чем ближе насекомое к источнику света, тем сильнее свет его раздражает. В результате насекомое, пытаясь улететь от опасности, продолжает стремиться к лампе, как к открытому пространству. В итоге все повторяется снова и снова и насекомое непрерывно бьется о лампочку.
Данное явление представляет собой технический интерес в плане создания так называемого beam-робота, то есть робота, имитирующего поведение насекомого.




Конструкция
В соответствии с замыслом Вити робот должен имитировать поведение насекомых в ночное время, а именно, движение в сторону источника света. То есть надо, по сути, определять ориентацию робота по отношению к свету и корректировать движение так, чтобы ориентация была постоянно на свет.
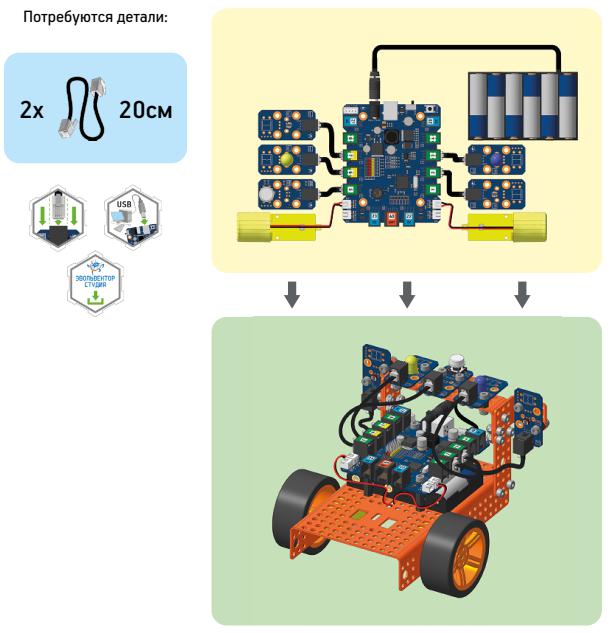
Решить такую задачу можно, если использовать датчик света, который способен определить падает ли на него свет и в каком количестве. Причем датчик нужен не один, а как минимум два, чтобы можно было вычислить с какой стороны света падает больше.
Вот и вырисовывается конструкция будущего beam-робота. Это шасси, на которое установлены по бокам два датчика света. Кнопка пуска/останова и индикаторы режимов работы робота, само собой, прилагаются.
Алгоритм
Алгоритм работы работы робота будет прост, как и само поведение насекомых. В основе него лежит принцип действия датчика освещенности (датчика света) и фундаментальный принцип распространения света.
Датчик освещенности системы Вертор 2.0 построен на фоторезисторе. Это такой электронный компонент, сопротивление которого меняется в зависимости от того, сколько на него падает света. Другими словами, его сопротивление зависит от уровня освещенности на поверхности датчика.
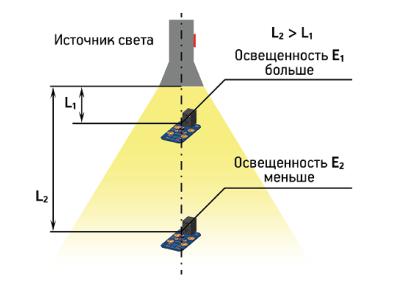
Что касается распространения света, то главное его свойство — это рассеиваемость. Вы наверняка замечали, что чем ближе вы к источнику света, тем светлее. При определенном удалении от источника эффект от освещения им вообще сходит на нет. Получается, что освещенность уменьшается при увеличении расстояния от источника. В применении к нашему роботу выходит, что, когда робота повернут к источнику света под некоторым углом — у него один датчик ближе к источнику, а другой дальше. И показания у датчиков будут разными.
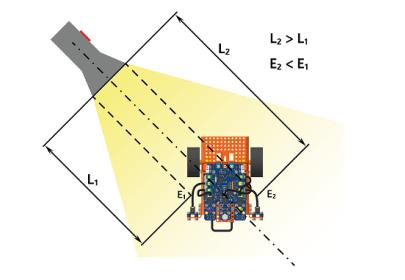
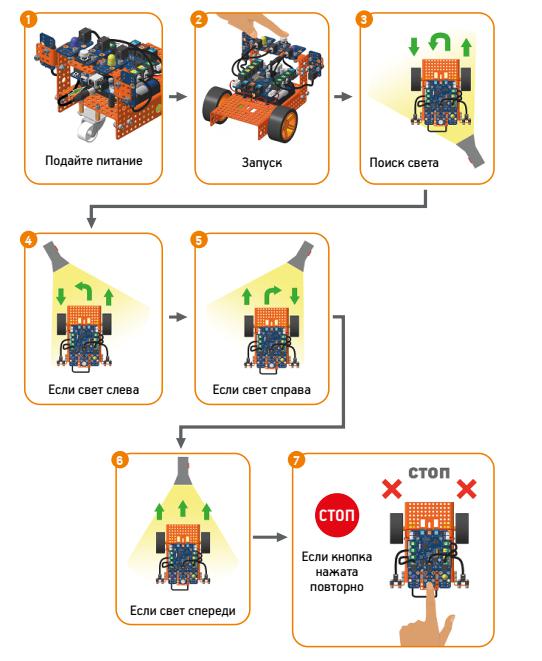
В этом случае остается только включить моторы робота так, чтобы робот поворачивался для выравнивания показаний датчиков и после двигался прямо на источник. Если освещенность на левом датчике больше, значит источник слева и туда же надо поворачивать. Если, наоборот, справа, значит источник света справа и надо поворачивать в ту сторону. В результате постоянно снимая показания датчиков и управляя соответствующим образом моторами мы получим движение робота в сторону света. Главное, чтобы источник света выделялся на общем фоне освещения. Поэтому, как и в реальности, лучше проверять работу алгоритма в темноте с фонариком.
Сборка
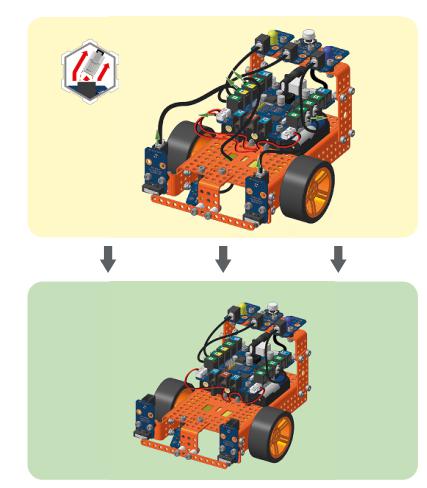
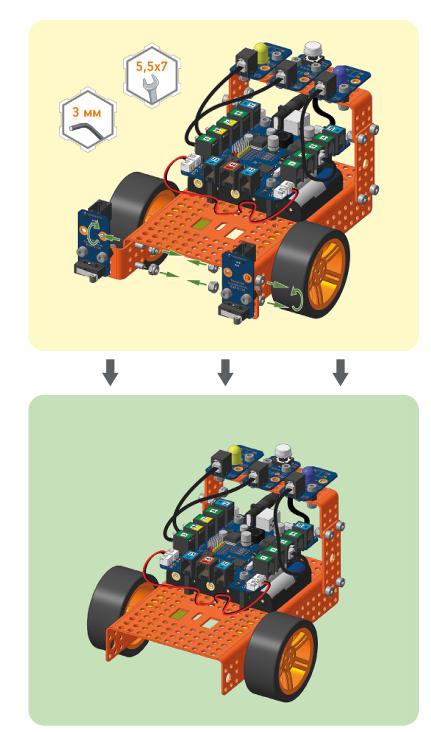
Уже стало традицией при сборке модели для очередного проекта снимать детали из предыдущего проекта, которые функционально становятся не нужны. Данный проект не исключение. Поэтому начнем с демонтажа всех атрибутов «газонокошения». Дальше потребуется установить два датчика света и робот будет готов.
Цель проекта — получить навыки использования в проектах датчика света.
1. Демонтаж конструкции предыдущего проекта
1.1 Отключение мотор-редуктора датчиков
1.2 Демонтаж нажимной планки бампера и датчика линии
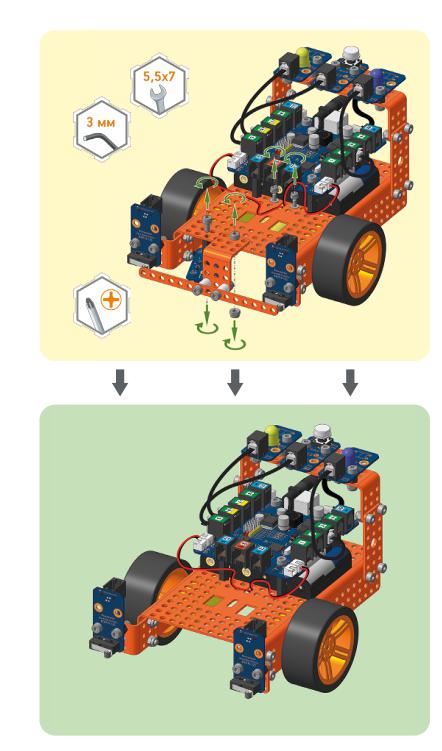
1.3 Демонтаж датчиков касания
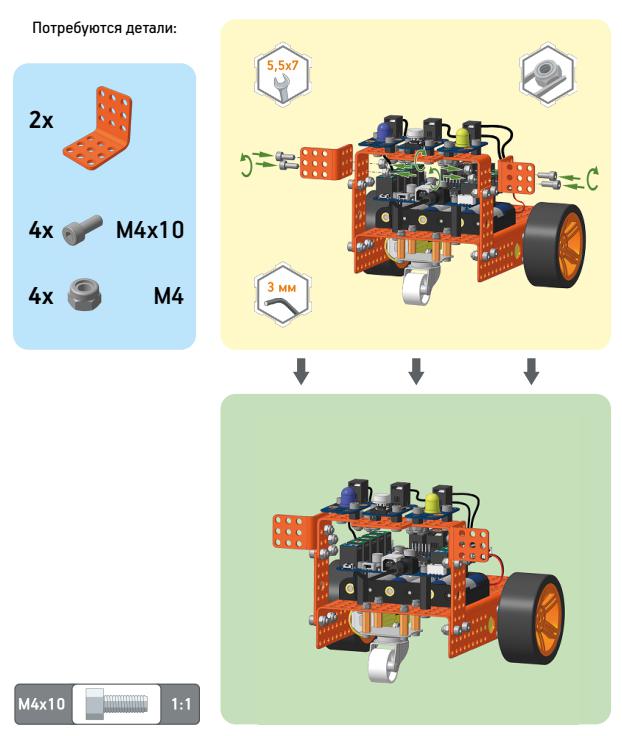
2. Установка датчиков света на шасси
2.1 Крепление кронштейнов
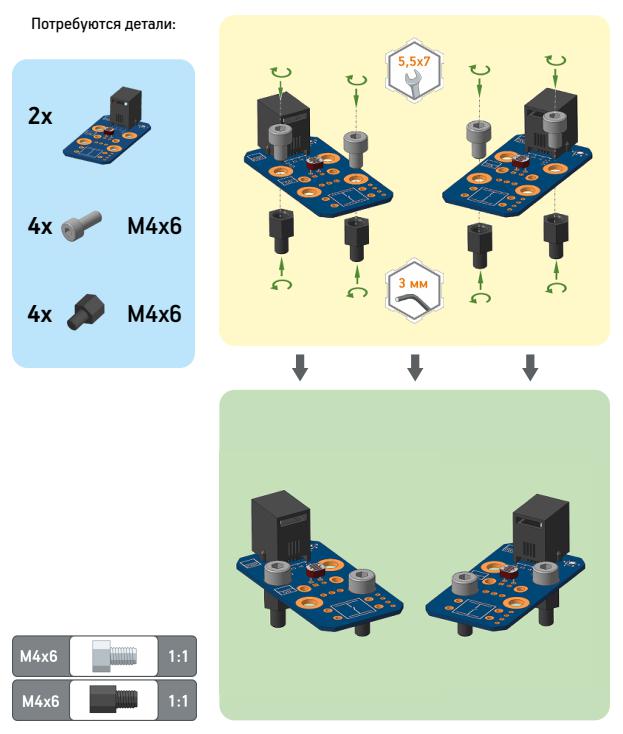
2.2 Подготовка датчиков к установке
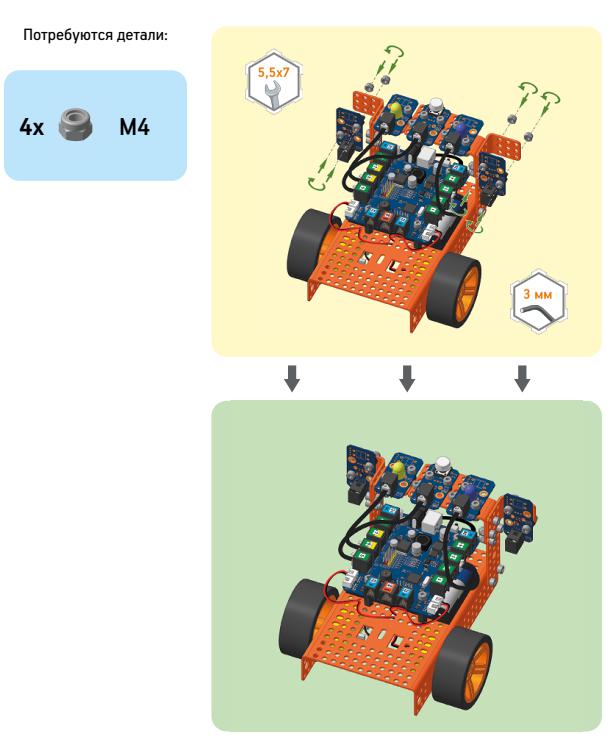
2.3 Крепление датчиков к кронштейнам
3.Подключение электронных модулей и загрузка программы в контроллер
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
Поместите робота на удобную поверхность с большой площадью Включите питание и запустите робота, нажав на кнопку запуска/останова. Робот должен начать работу в соответствии с приведенным ниже описанием. Для завершения работы нажмите на кнопку запуска/останова еще раз.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: