


Проект №12 «Газонокосильщик»

Продолжим автоматизацию рутинных работ. После весны и уборки дорожек пешеходных зон, а также дорог от зимнего мусора, наступает лето. Прекрасная пора, в которой насупает буйство зелени и торжество растений.
С одной стороны, это хорошо. Растения дают нам кислород, да и просто радуют глаз. А с другой, если трава растет на газоне, то она через какое-то время вырастает такой, что ходить по ней становится откровенно затруднительно.
Поэтому за газонами принято ухаживать и регулярно подстригать траву, чтобы ее высота всегда находилась на эстетически правильном и комфортном уровне.


Конструкция
Газонокосильщик должен косить траву, другими словами, срезать ее. А резка чего-либо обычно выполняется ножом. Наиболее технологичным и простым в плане реализации является нож в виже насадки на вал электродвигателя. То есть двигатель его вращает по кругу и все травинки, которые попадаются ему на пути, будут срезаны.
По понятным соображениям безопасности в конструкторе настоящий нож мы использовать не можем. Зато для иллюстрации принципа работы модели робота мы вполне можем применить его имитацию. В качестве нее выступит качалка от серводвигателя, которую мы оденем на выходной вал мотор-редуктора (размер как раз подходит).
Для того, чтобы травинки попадались у такого ножа на пути, потребуется этот нож перемещать по газону. Очевидно, что как нельзя лучше для этого подходит наше мобильное шасси. В итоге получается, что мотор-редуктор с одетым на него «ножом» надо закрепить под роботом. Таким образом, при включении привода «ножа» и перемещении шасси по газону импровизированный «нож» будет вращаться и имитировать кошение травы.
Не стоит также забывать о том, что на газоне могут встречаться объекты, которые осложняют кошение. Это могут быть клумбы или временно оставленные громоздкие предметы в виде ящиков, коробок и т. д. Для того, чтобы робот понимал присутствие подобного рода препятствий и объезжал их, его надо оснастить бампером с двумя датчиками касания по его краям. Так, при упоре робота в препятствие один из датчиков будет срабатывать и машина получит информацию о том, что она уперлась, и не будет бесконечно буксовать, пытаясь сдвинуть встретившийся на пути объект.
Алгоритм
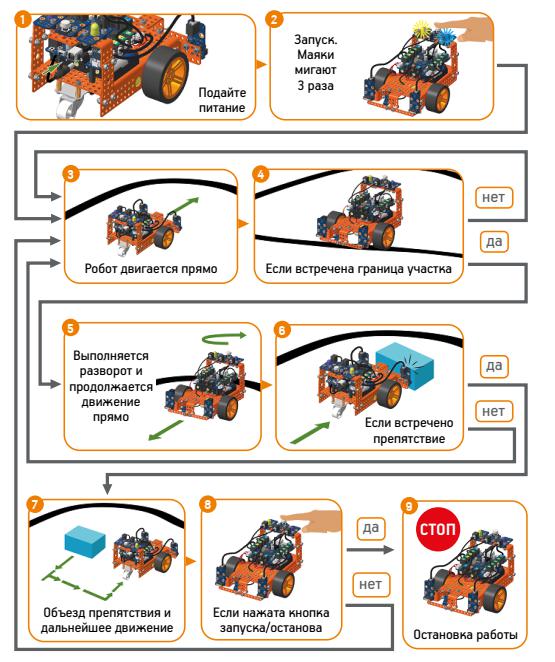
Целью любого газонокосильщика является красивый ухоженный газон с ровно подстриженной травой. Газон при этом всегда занимает некоторую площадь. В связи с этим роботу придется работать по площади точно также, как работал снегоуборщик. Достаточно организовать хаотическое движение робота по выделенной площади и через какое-то время он все травинки подрежет до нужной длины.
Так же, как и в случае с уборкой снега, задавать границы трявянной лужайки мы можем с помощью черной линии. То есть можно взять лист с трассой из комплекта конструктора. В итоге получится, что для выкашивания воображаемого газона робот должен включать привод ножа и хаотчично двигаться внутри этой трассы. Определять границу участка он будет с помощью датчика черной линии.
Дополнительным усложнением алгоритма станет учет возможных препятствий на газоне. Они определяются с помощью нажимных датчиков касания, установленных позади нажимного бампера. При столкновении с каким-либо предметом на газоне один из этих датчиков будет нажат. Следовательно придет с датчика сигнал о столкновении. В этом случае будет запускаться подалгоритм объезда препятствия роботом.
Запуск и останов автоматического газонокосильщика будем выполнять с помощью кнопки запуска/останова, как и во всех остальных моделях роботов.
Сборка
Пылевая щетка при кошении газона является вещью абсолютно бесполезной и даже вредной. Поэтому ее придется демонтировать. А вместо нее установим под роботом имитатор ножа с тем же приводом в виде мотор-редуктора, который использовался для приведения вдвижение щетки.
Цель проекта — познакомиться с конструктивным вариантом решения еще одной достаточно полулярной практическо-хозяйственной задачи.
1. Демонтаж конструкции предыдущего проекта
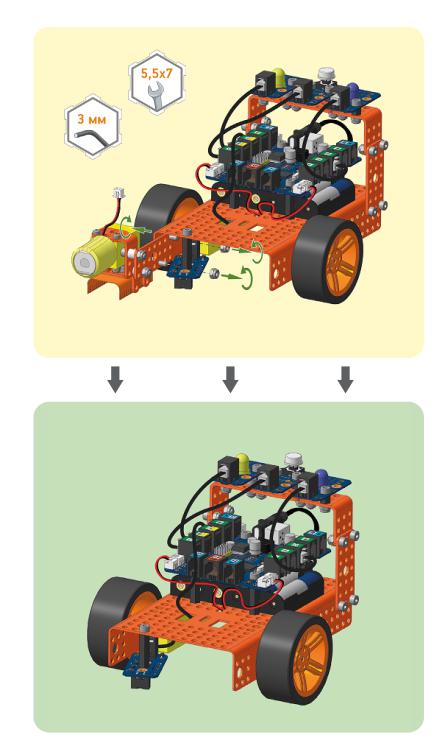
1.1 Отключение мотор-редуктора и одного датчика линии
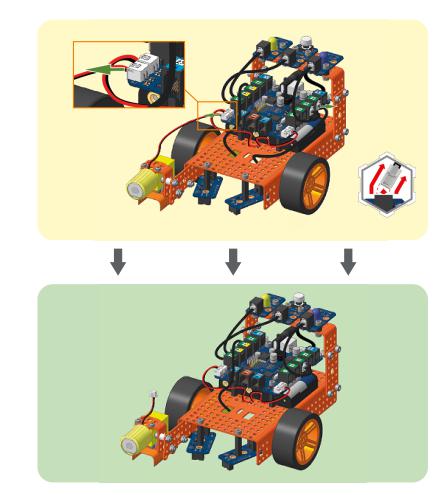
1.2 Демонтаж датчика линии
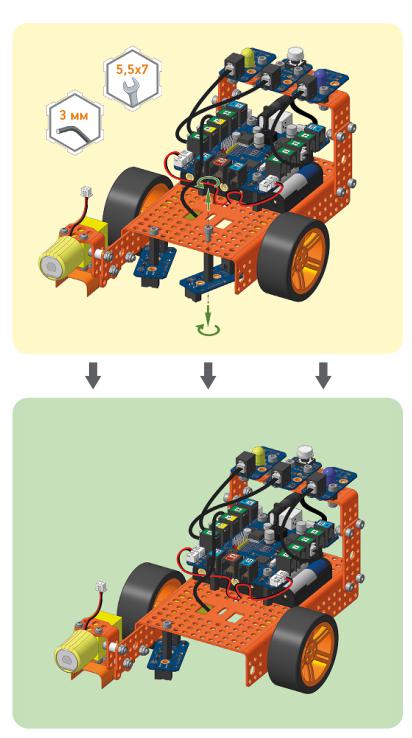
1.3 Демонтаж щетки
2. Установка «ножа» с приводом
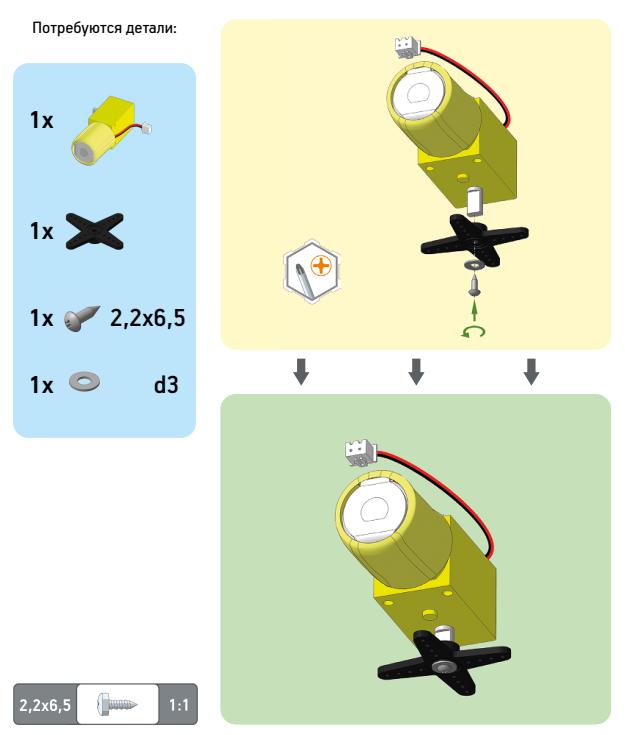
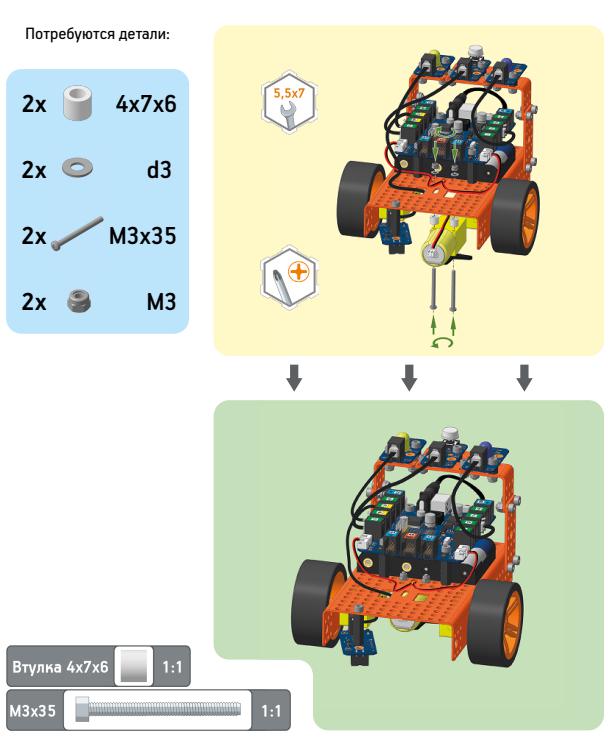
2.1 Крепление имитации ножа на вал мотор-редуктора
2.2 Монтаж привода с ножом на шасси
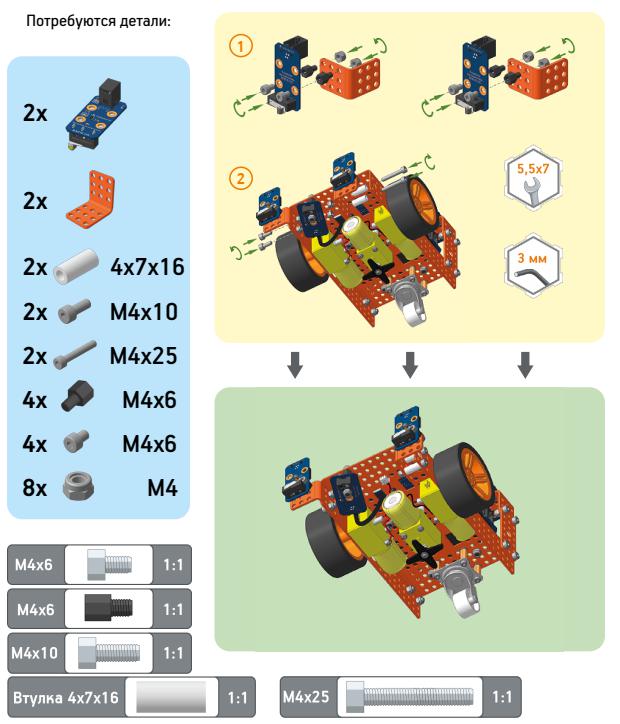
3. Сборка и установка бампера с датчиками нажатия
3.1 Монтаж датчиков
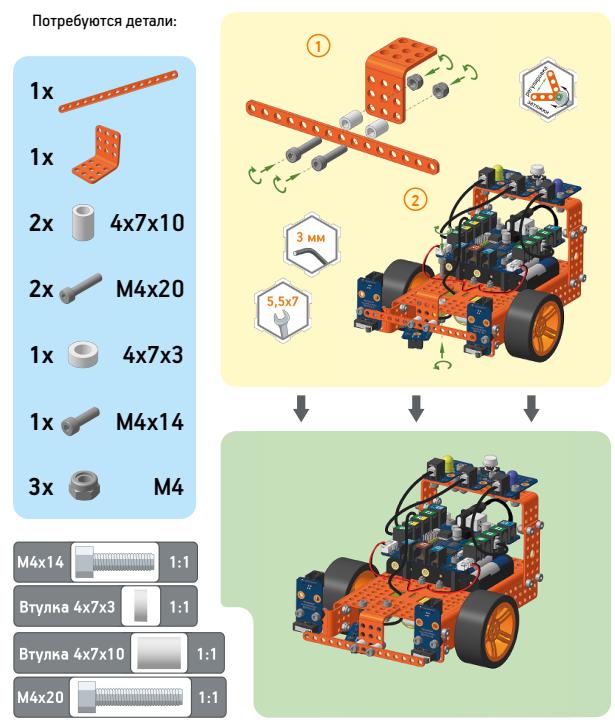
3.2 Сборка и монтаж контактной части
4. Подключение электронных модулей и загрузка программы в контроллер
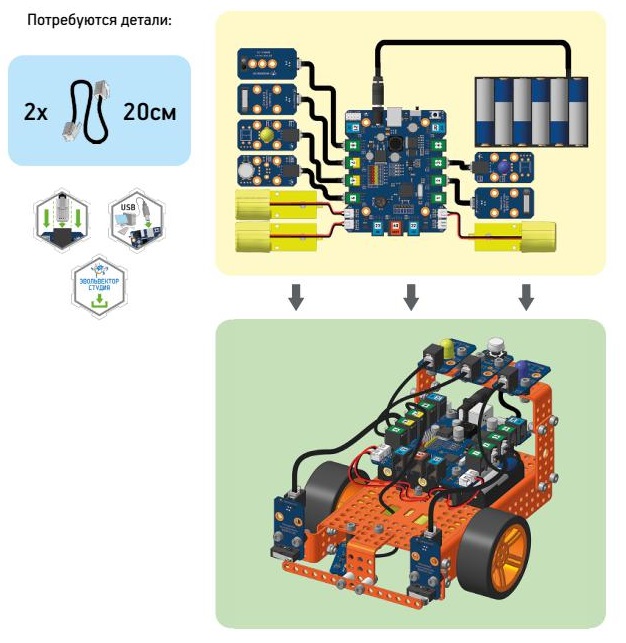
Программы для загрузки в контроллер по данному проекту можно скачать в двух вариантах по ниже указанным ссылкам:
- для среды программирования "Студия Эвольвектор",
- для среды программирования Arduino IDE.
Проверка робота в работе
Установите робота на лист с трассой внутрь нее. Также положите на эту площадку с краю коробку из конструктора с каким-либо грузом внутри. Включите питание и запустите робота, нажав на кнопку запуска/останова. Робот должен начать работу в соответствии с приведенным ниже описанием. Для завершения работы нажмите на кнопку запуска/останова еще раз.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: