


Электронный модуль «Драйвер двигателей L298N»

1. Назначение устройства
Электронный модуль «Драйвер двигателей L298N» (Рис. 1.1) является элементом системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР). Он выполняет функцию исполнения команд подключенного к нему контроллера по управлению нагрузкой, которую не способен принять на себя контроллер. В частности драйвер позволяет управлять моторами с суммарным током потребления до 3 А (два мотора по 1,5 А). Это позволяет использовать его для создания робототехнических устройств на основеклассических плат Ардуино, в которых требуется управлять подходящими по характеристикам двигателями постоянного тока.
Рис. 1.1
Модуль рассчитан на применение совместно с программируемыми контроллерами и шилдами, входящими в систему ВЕРТОР (подробная информация о системе представлена на сайте https://academy.evolvector.ru).
2. Конструкция модуля и назначение выводов (контактов)
Модуль «Драйвер двигателей L298N» выполнен в форме печатной платы, на которой смонтированы группа штыревых контактов, с помощью которых осуществляется управление подключенной нагрузкой; клеммники для подключения нагрузки; индикатор питания драйвера двигателей; индикаторы подачи сигналов на подключенную нагрузку; микросхема драйвера двигателей L298N, являющаяся основным управляющим элементом модуля (Рис. 2.1)
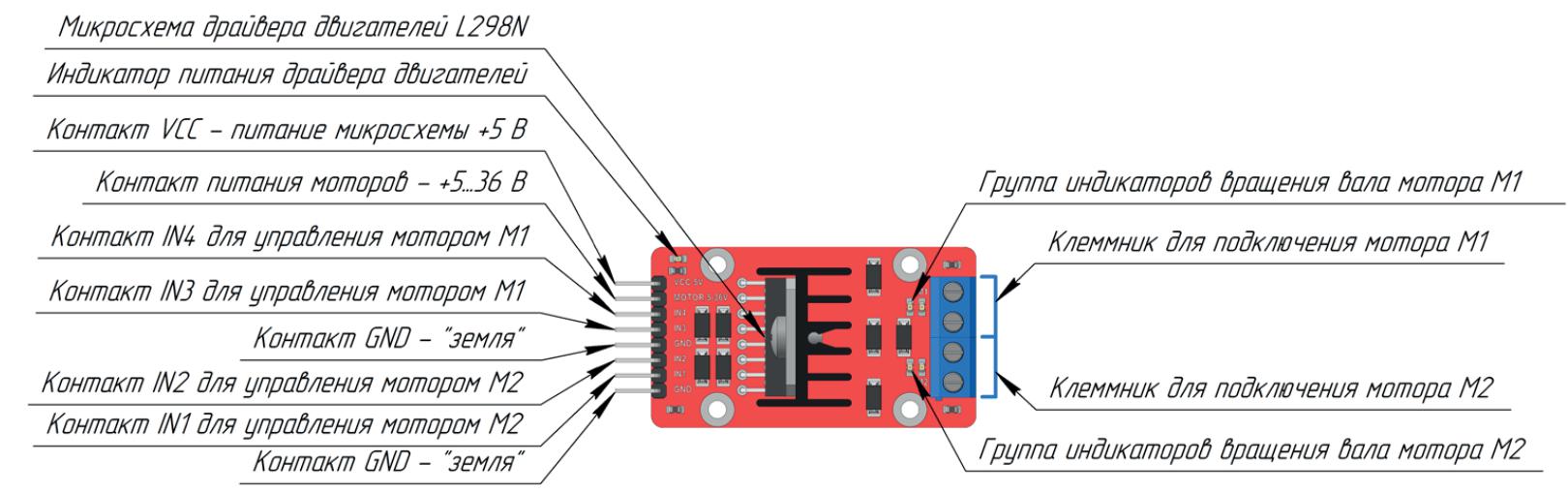
Рис. 2.1
Плата имеет четыре крепежных отверстия под винтМ3. Диаметры крепежных отверстий и физические размеры модуля представлены на рисунке 2.2. По расстоянию между крепежными отверстиями (кратно 8мм) модуль совместим с конструкторами Эвольвектор,LEGO, MakeBlock и может крепиться к их деталям с помощью стоек.
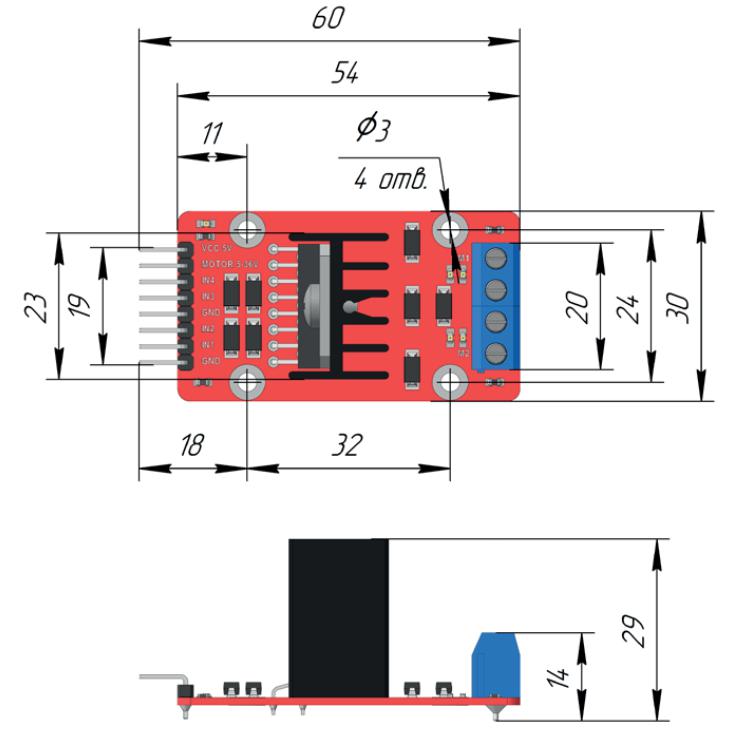
Рис. 2.2
Модуль не является независимым устройством и может работать совместно с контроллерами системы ВЕРТОР или иными контроллерами.
Подключение модуля к контроллеру осуществляется с помощью группы штыревых контактов, имеющих следующее назначение:
VCC - к “+” источника питания контроллера;
MOTOR 4,5-36V - к “+” источника питания батареи;
IN1 - подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления первым контактом (М11 на схеме рис. 3.1а) мотора №1;
IN2 - подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления вторым контактом (М12 на схеме рис. 3.1а) мотора №1;
IN3 - подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления первым контактом (М21 на схеме рис. 3.1а) мотора №2;
IN4 - подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления вторым контактом (М22 на схеме рис. 3.1а) мотора №2;
GND - «земля» (общий провод).
Для указанных контактов на печатной плате модуля нанесена соответствующая маркировка белого цвета.
3. Принцип работы
Контакты классических контроллеров типа Arduino Leonardo или Arduino UNO, настроенные как выходы, способны выдавать сигналы с током не более 20 мА. Это подходит для подачи управляющего сигнала на устройства, рассчитанные на слаботочные сигналы. Но для питания применяемых в образовательных робототехнических моделях моторов, которые могут потреблять под нагрузкой 500 мА и более, этого явно недостаточно. Поэтому для коммутации больших токов, необходимых для питания мощной нагрузки применяются«посредники» в виде драйверов, которые имеют отдельный от контроллера источник питания достаточной мощности и позволяют управлять нагрузкой с требуемыми параметрами.
Как следует из названия, драйвером двигателя называется такая микросхема или электронный модуль, которая предназначена для управления большой нагрузкой, в качестве которой выступают электродвигатели (driver – в переводе с англ. водитель, управляющий).
В конструкторах «Эвольвектор» используются мотор-редукторы с коллекторными двигателями постоянного тока. Они имеют разные мощностные и силовые характеристики. Рассматриваемый драйвер двигателей подходит для управления теми моторами, у которых потребляемый ток может достигать 1,5 А. К такиммотор-редукторам относятся мотор-редукторы с металлическим корпусом. Модуль драйвера двигателей на основе микросхемы L298N позволяет управлять двумя такими моторами.
К драйверу подключаются два мотора, которые можно обозначить, как М1 и М2. Питание каждого из них осуществляется с помощью двух контактов. Соответственно для данных контактов можно использовать обозначения М11, М12, М21, М22 (показаны на рис. 3.1 а). С другой стороны платы имеются штыри для подачи управляющих сигналов, которые промаркированы IN1,IN2, IN3, IN4. Каждый вход управляет своим контактом двигателя: IN1 управляет М11, IN2 управляет М12, IN3 управляет М21, IN4 управляет М22.
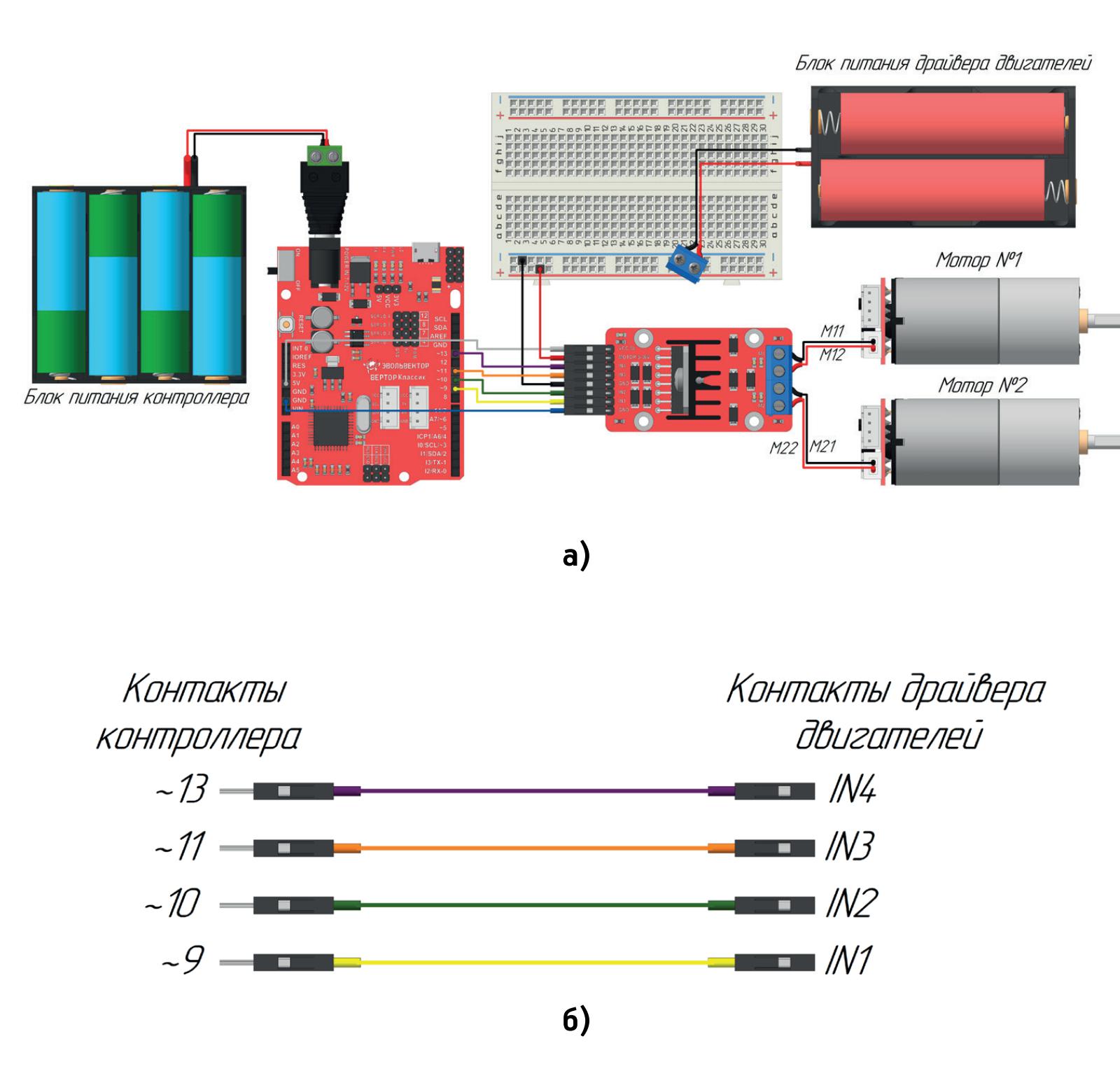
Рис. 3.1
Таким образом принцип работы драйвера двигателей состоит в том, что на входы IN1, IN2, IN3, IN4 подаются слаботочные сигналы от контроллера, которые выключают, включают полностью или частично (с помощью ШИМ) питание на контактах М11, М12, М21, М22.
Как именно выполняется управление моторами путем подачи сигналов (напряжения) на входные контакты показано на рисунках 3.2 и 3.3. Зависимости поведения мотор-редукторов от управляющих сигналов продемонстрированы для случая, когда моторы подключены к драйверу согласно схемы рис. 3.1а.
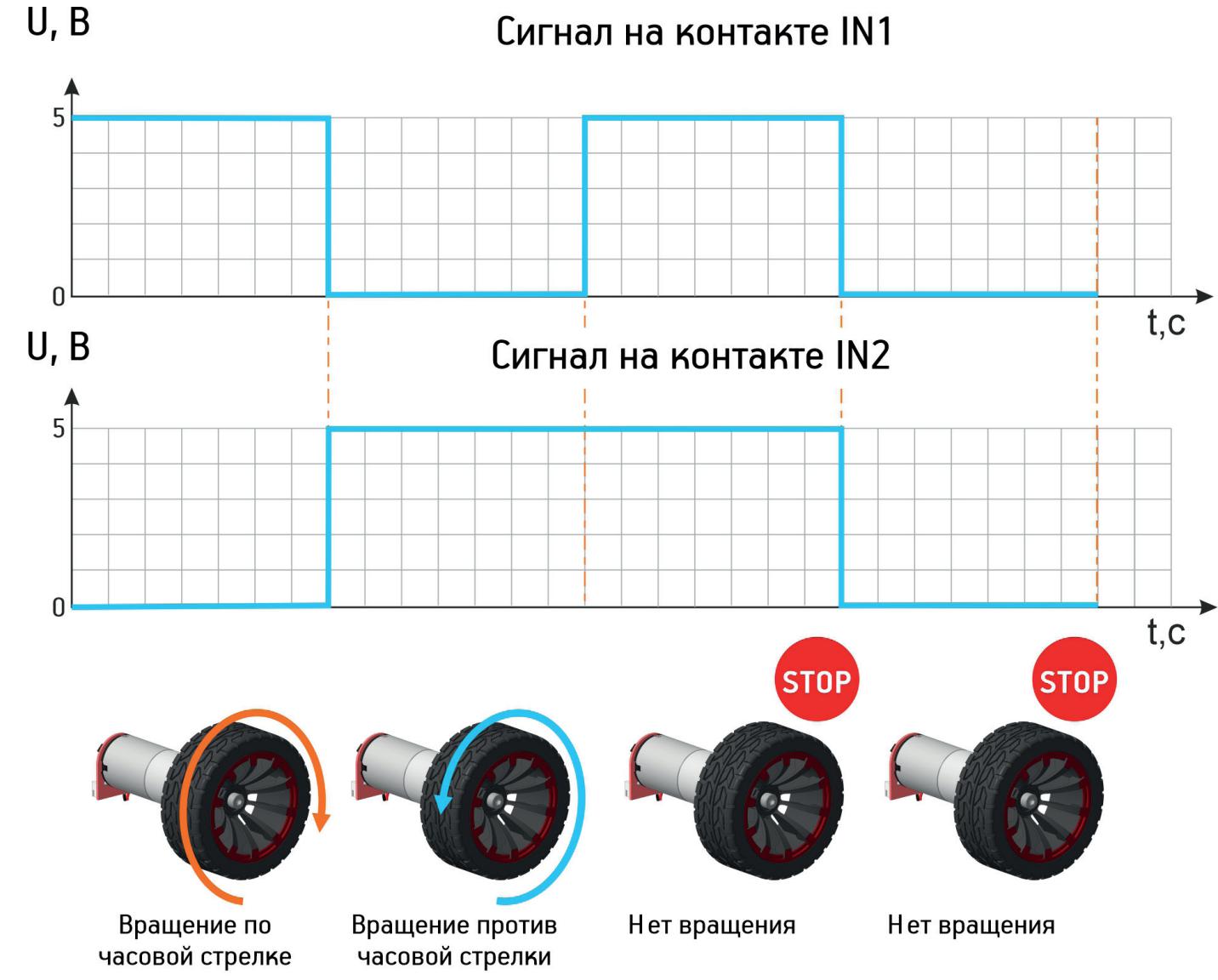
Рис. 3.2
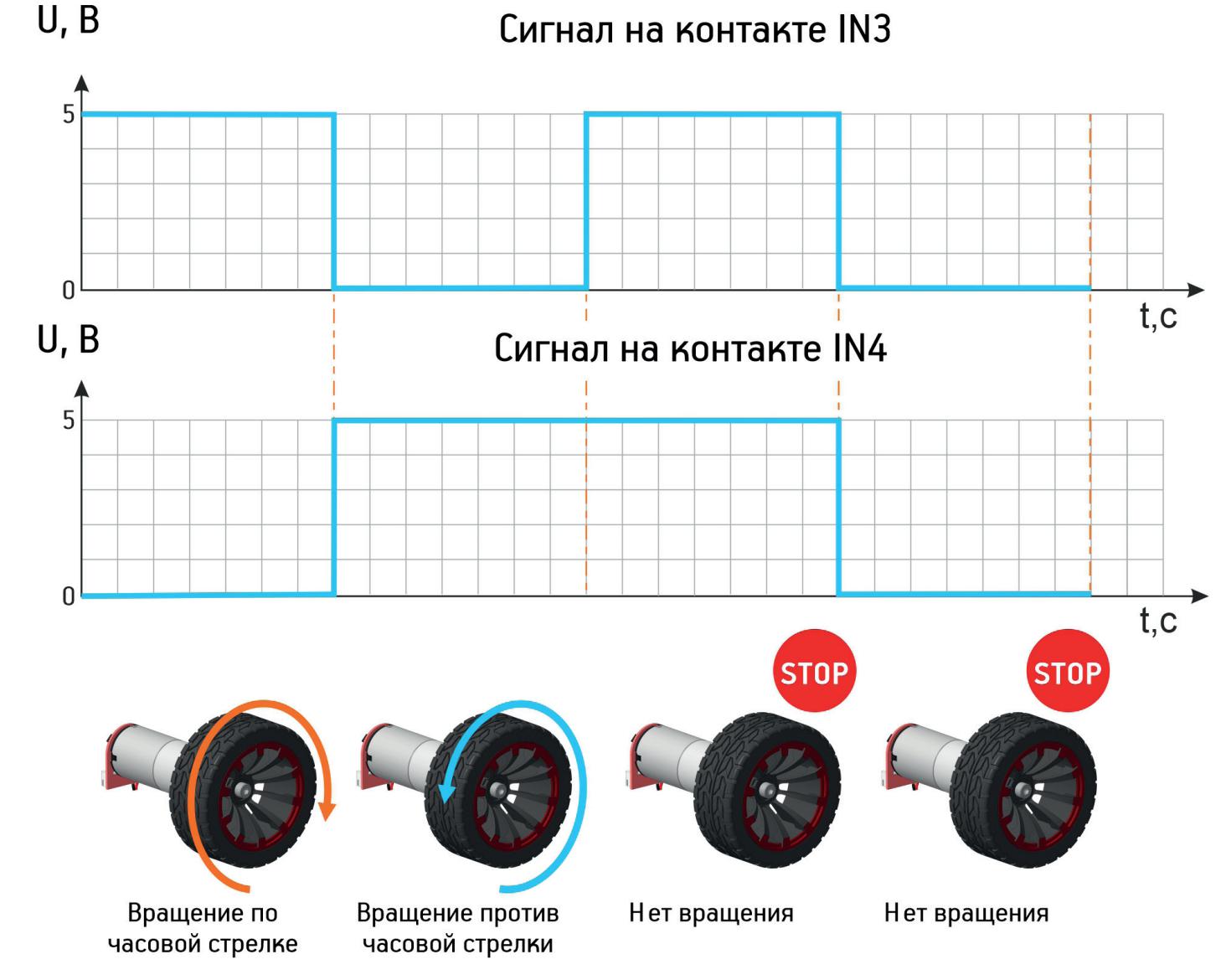
Рис. 3.3
Из приведенных иллюстраций хорошо видно, что для создания напряжения на моторе подается на один вход драйвера логический «0», а на второй - логическая «1». В этом случае на одном контакте мотора будет полное напряжение питания мотора, а на втором 0 В, что создает разницу потенциалов, равную поданному питанию на контакт MOTOR 4,5-36V драйвера и мотор вращается. В зависимости от того, на каком выходе 0 В, а на каком полное напряжение, определяется направление вращения мотор-редуктора.
Если же требуется управлять скоростью вращения вала мотора, то вместо логической «1» подается ШИМ-сигнал. Однако следует помнить, что чем меньше разность потенциалов между двумя выводами управления, тем медленнее будет вращаться вал двигателя и одновременно будет меньше крутящий момент на выходном валу. Это может приводить к тому, что при определенной нагрузке развиваемого крутящего момента будет не хватать и вал будет останавливаться.
4. Технические характеристики
| Наименование характеристики | Значение |
| Габаритные размеры | 30х54 мм |
| Тип разъема | Группа штыревых контактов |
| Номинальное напряжение питания модуля, В | 5 |
| Напряжение питания моторов, В | 5...38 |
| Максимальное количество подключаемых моторов | 2 |
| Максимальный ток, отдаваемый в подключенную нагрузку, А | 3 |
| максимальный ток на один мотор | 1,5 А |
5. Условия гарантии
ООО «Эвольвектор» гарантирует работоспособность электронного модуля на протяжении всего гарантийного срока эксплуатации, который составляет 12 месяцев с момента приобретения устройства. Также гарантируется совместимость модуля с другими устройствами системы управляющей электроники ВЕРТОР.
Гарантийные обязательства производителя распространяются только на ту продукцию, которая не имеет повреждений и не выведена из строя в результате неверных действий пользователя.
По вопросам гарантийного обслуживания, а также по всем техническим и информационным вопросам можно обращаться на электронную почту:
info@evolvector.ru
help@evolvector.ru
а также по телефону +7 (499) 391-01-05
Адрес для корреспонденции: 143300, Московская область, г. Наро-Фоминск, ул. Московская, д.15.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: