


§ 2.1 Детали и узлы.

В разделе 1.3 рассматривалось устройство робота-пылесоса. Если его разобрать (рис. 1.3.1), то можно увидеть, что робот состоит из соединенных между собой отдельных частей. Они являются деталями либо узлами.
Деталь - это изделие, которое является частью машины или какой-либо конструкции. Изготавливается деталь из однородного по своим свойствам материала без применения при этом каких-нибудь сборочных операций.
Если несколько деталей соединяются между собой для выполнения конкретной функции машины и крепятся к ее общей конструкции в таком собранном виде, то такая совокупность деталей называется узлом.
Деталь и узел — это ключевые понятия любой механической конструкции. Поэтому отныне и далее они будут активно использоваться при объяснении принципов создания роботов.
Детали могут быть пластиковыми, металлическими, деревянными или быть сделанными из любого другого подходящего материала. Возможна различная форма и размеры, как того требует конструкция машины. Естественно, что у разных деталей обычно и разное назначение.
Присмотритесь повнимательнее к деталям, из которых состоит робот-пылесос (рисунки 1.3.1 и 1.3.2). Вы увидите, что они имеют относительно сложную форму. И форма каждой детали соответствует месту, куда она устанавливается и крепится. Когда все детали установлены на предусмотренных для них местах, получается собранное устройство - машина, которая в данном случае является роботом-пылесосом.
Указанные детали изготовлены именно для этого устройства. Из них можно собрать исключительно робот-пылесос и больше ничего. Попробуйте разобрать подобный пылесос и собрать из полученных деталей что-то другое. Например, манипулятор или другой тип мобильного робота (автоматический снегоуборщик или газонокосилку).
У вас ничего не получится!
Между тем, цель каждого, кто держит данную книгу в руках, заключается в том, чтобы научиться конструировать разные типы роботов: всевозможные варианты мобильных роботов, различные конструкции манипуляторов и комбинации мобильных шасси с манипуляционными конструкциями. Конструировать — это значит не просто придумывать теоретические конструкции, но и собирать модели роботов на практике, программировать их и настраивать.
Для достижения этой цели нужны универсальные и недорогие, но функциональные детали и узлы, из которых было бы возможно собирать все перечисленные робототехнические конструкции. То есть нужны такие комплектующие, которые можно использовать для сборки разных роботов. И при этом очень желательно, чтобы детали были достаточно прочными и позволяли собирать крепких роботов способных решать любые образовательные задачи.
Очевидно, что универсальность этих деталей обеспечивается только тогда, когда их форма и принцип соединения друг с другом позволяют собирать механизмы разных типов. Значит, форма должна быть простой, а способы соединения деталей максимально стандартизированы, т. е. приближены к тем стандартам, которые действуют в промышленности разных стран мира.
Именно эти принципы лежат в основе устройства деталей робототехнического конструктора «Эвольвектор» и тех конструкций, которые из них собираются. Они металлические. Изготовлены из листового алюминия, поэтому имеют малый вес, но при этом относительно высокую прочность и жесткость. Соединяются детали между собой с помощью металлического крепежа, который в таком же виде используется в промышленности. В деталях выполнено множество отверстий, и при их соединении винты проходят сквозь указанные отверстия, а с обратной стороны накручивается гайка. После затяжки гайки на винте образуется очень прочное соединение. Для соблюдения универсальности расстояния между центрами крепежных отверстий всегда кратны 8 мм, благодаря чему достигается совместимость деталей конструктора между собой.
И снова вспомним про робот-пылесос. Давайте проанализируем его конструкцию (обратимся снова к рисункам 1.3.1 и 1.3.2) и посмотрим, какие детали есть в конструкторе «Эвольвектор» для того, чтобы собрать модель, которая, например, повторяет принцип работы этого пылесоса.
1. У робота-пылесоса сверху и снизу большие плоские поверхности. Действительно, какого бы робота вы не собирали, у вас обязательно будут плоские элементы конструкции. Разумеется, для этого понадобятся различные плоские детали. К таким деталям относятся пластины. Они являются самыми простыми деталями и чаще всего используются при создании конструкций. В конструкторе «Эвольвектор» представлен очень широкий перечень пластин: от узких до широких, от малых до больших. В их обозначениях содержится информация о размерах. Она выражается в количестве отверстий по двум направлением. Примеры деталей такого типа и их обозначения приведены на рисунке 2.1.1.
 |
 |
 |
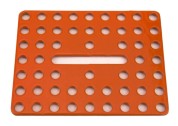 |
| Пластина 1х4 | Пластина 3х3 | Пластина 3х7 | Пластина 7х9 |
|
Рис. 2.1.1. Примеры пластин с их обозначением |
|||
2. Робот-пылесос имеет цилиндрическую форму. Плоские верхняя и нижняя части соединены между собой круглой боковиной. И боковая часть перпендикулярна плоским. Получается, что для сборки такой конструкции необходимы детали, которые позволяют перейти от горизонтальной поверхности к вертикальной и наоборот. Проще говоря, нужны согнутые детали. Они должны быть согнуты специальным образом на прессе. Чаще всего разные части у таких деталей согнуты под углом 90 градусов. Это могут быть как уголки, так и рамы в виде буквы «П». На рисунке 2.1.2 показаны примеры деталей такого типа.
 |
 |
 |
|
| Уголок 1х1 | Уголок 3х3 | Балка 1х7 | П-образный корпус мини |
|
Рис. 2.1.2. Примеры деталей, изготовленных с помощью гибки |
|||
3. На рисунке 1.3.2 хорошо видны (и обозначены) моторы, которые прикреплены к корпусу робота. Для того чтобы сделать то же самое при сборке модели робота из конструктора, необходимы специальные детали. Они называются кронштейнами. Функция кронштейна — соединение узлов машины с ее корпусом, другими узлами или другими деталями. В конструкторе доступны кронштейны для крепления приводов разных типов, а также поворотные кронштейны для соединения узлов подвижных друг относительно друга (рис. 2.1.3).
 |
 |
 |
 |
| Кронштейн для крепления мотор-редукторов с цилиндрическим редуктором | Кронштейн для крепления мотор-редукторов с червячным редуктором | Кронштейн для крепления стандартного серводвигателя | Поворотный кронштейн |
|
Рис. 2.1.3. Образцы кронштейнов, с помощью которых к роботу крепятся приводы и подвижные узлы |
|||
4. Моторы в роботе-пылесосе прикручены к корпусу не просто так. Каждый мотор что-то вращает. Это может быть колесо, щетка или вентилятор всасывающего насоса. Все эти элементы или механизмы необходимо как-то крепить к валам мотор-редукторов. Для этого существуют вспомогательные детали, относящиеся к деталям вращения (показаны на рисунке 2.1.4). То есть они предназначены для вращения вокруг своей оси. При выполнении последующих практических заданий вы сможете убедиться в их незаменимости при креплении к приводам поворотных механизмов.
 |
 |
 |
| Ступица для вала серводвигателя | Ступица для вала мотор-редуктора | Муфта для установки колеса на вал мотор-редуктора |
|
Рис. 2.1.4. Детали вращения для крепления приводимых деталей и узлов к приводам |
||
5. Когда две детали соприкасаются и двигаются относительно друг друга, между ними всегда существует трение. Оно приводит к ускоренному износу деталей в месте соприкосновения, а также затрудняет движение. Приходится тратить дополнительную энергию. Для решения этой проблемы в промышленности давно придуман такой узел, как подшипник. О том, как он устроен и как работает, будет рассказано позже. Ну а пока на рисунке 2.1.5 приведены примеры подшипников качения для получения представления о том, как внешне выглядят эти устройства.
 |
 |
| Радиально-упорный подшипник качения с фланцем 4х9х4 | Упорный подшипник качения с фланцем 35х52х12 |
|
Рис. 2.1.5. Примеры подшипников качения, уменьшающих сопротивление при создании подвижных соединений деталей |
|
6. Робот-пылесос движется сам и у него также находятся в движении механизмы, которые двигаются электромоторами. В дальнейших проектах учебного курса вы узнаете, что очень часто необходимо передавать движение от двигателя к деталям, расположенным в разных местах. И почти всегда требуется преобразовывать движение из быстрого в медленное или наоборот. В этих случаях на помощь приходят механические передачи. Конкретно у рассматриваемого робота-пылесоса передачи присутствуют в редукторах, через которые движение передается от моторов к колесам.
На рисунке 2.1.6 показаны детали конструктора с элементами зубчатой передачи, а также звездочка для передачи движения от мотор-редуктора к гусенице.
 |
 |
| Зубчатые рычаги | Звездочка для привода гусеницы |
|
Рис. 2.1.6. Элементы механических передач |
|
7. В процессе рассмотрения робота-пылесоса мы постоянно говорим о движении и о моторах, которые создают это движение. На самом деле узлы, двигающие детали и узлы робота, правильнее называть приводами. Термин «привод» произошел от слова «приводить», приводить в движение. Понятие «привод» является гораздо более широким, чем просто электродвигатель или электромотор. Привод — это устройство для приведения в движение механизмов с заданными параметрами движения. То есть привод обеспечивает нужные скорость, направление и характер движения. На рисунке 2.1.7 показаны примеры приводов в виде мотор-редукторов и сервоприводов, которые будут использоваться для сборки роботов из деталей и узлов конструктора.
 |
 |
 |
 |
|
Мотор-редуктор |
Мотор редуктор |
Мотор-редуктор |
Сервопривод 14кг*с |
|
Рис. 2.1.7. Примеры различных типов приводов |
|||
8. У любого робота есть приводы и есть детали, которые эти приводы приводят в движение. Выше указаны примеры вспомогательных деталей и деталей механических передач, которые соединяются непосредственно с приводами. Однако всегда в исполнительных механизмах есть детали или целые узлы, которые стоят последними в цепочке движущихся элементов роботов. Их можно назвать приводными или приводимыми деталями (узлами, если это узел), т. е. элементами, которые приводятся в конечном итоге в движение и совершают основную работу робота. У робота-пылесоса такими приводными элементами являются колеса, щетки, рабочий вентилятор всасывающего насоса. А в конструкторе это могут быть те же колеса, гусеницы или узлы, собранные из стандартных деталей конструктора (рис. 2.1.8).
 |
 |
 |
| Колесо диаметром 65 мм | Колесо диаметром 130 мм | Гусеницы |
|
Рис. 2.1.8. Примеры приводных деталей и узлов, которые приводятся в движение электроприводами |
||
9. Робот-пылесос оснащен специальным бампером, который соединен с датчиками касания. Бампер имеет небольшой рабочий ход. Если по каким-то причинам оптические датчики не распознали препятствие, то робот упирается в него бампером. Бампер в свою очередь нажимает на встроенные датчики и система управления робота получает информацию о том, что дальше двигаться нельзя. Робот отъезжает назад, а установленная внутри пружина возвращает бампер в первоначальное положение. Пружина относится к классу деталей, которые можно назвать упругие элементы. К данному типу относятся детали, которые могут упруго деформироваться. Это всевозможные резиновые кольца и пружины (рис. 2.1.9).
 |
 |
| Пружина | Резиновое кольцо 004-008-25 |
|
Рис. 2.1.9. Упругие элементы способные упруго сжиматься под давлением и принимать первоначальную форму без нагрузки |
|
10. Процесс разборки робота-пылесоса начинается с того, что необходимо выкрутить винты, скрепляющие корпус с крышкой и бампер с корпусом. Винт — это деталь, которая является ярким представителем класса крепежных элементов или, проще говоря, крепежа. Помимо винтов в эту категорию деталей входят гайки, шайбы и втулки. Крепеж — это важнейшая часть конструкции робота, поскольку именно с помощью него выполняются все виды соединений деталей и обеспечивается сборка всей конструкции робота.
 |
 |
 |
 |
| Винт | Гайка | Шайба | Втулка |
|
Рис. 2.1.10. Образцы крепежных изделий, с помощью которых соединяются между собой детали конструкции робота |
|||
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: