


§ 1.5 Механическая часть и ее классификация

Система управления роботом играет огромную роль. Но не менее важна и механическая конструкция машины. Ведь именно от нее зависят очень многие характеристики: грузоподъемность, производительность, скорость перемещения, ресурс, точность и повторяемость действий, проходимость и т.д.
Существуют различные взгляды на то, как именно классифицировать роботов. Разделять их на группы в части механики можно по самым разным признакам: по назначению, по подвижности, по грузоподъемности, по виду приводов.
Учебный курс «Эвольвектор» по изучению робототехники предназначен для школьников и основан на выполнении реальных практических проектов. Поэтому будем классифицировать только те механические конструкции роботов, модели которых можно относительно легко создать в домашних условиях или в пределах образовательного учреждения (например, школы). В этом случае наиболее подходящим будет разделение на классы по принципу действия роботов и по взаимодействию с окружающими предметами. Схема с вариантом такой классификации представлена на рис. 1.5.1.
 |
| Рис. 1.5.1 Классификация роботов по типу механической части |
Для лучшего понимания отличий между приведенными на схеме типами механических частей роботов ниже приведены короткие комментарии по каждому их виду.
1. Мобильные. Это роботы, принцип действия которых неразрывно связан с перемещением в пространстве, то есть с движением. Перемещаться и двигаться они могут в разных физических средах. Возможно создание робототехнических машин для перемещения по земле или любой твердой поверхности. А могут создаваться и роботы для полетов в воздушном пространстве или плавающие в водной среде.
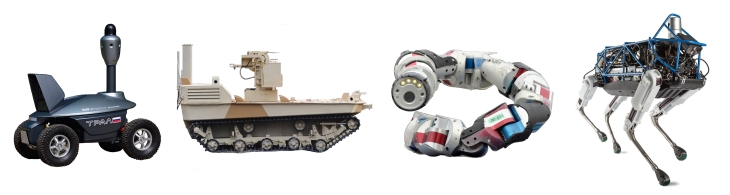
1.1. Наземные. Такой вид роботов является самым популярным. Это логично, так как на суше больше всего работы, которую надо выполнять. И она очень разнообразна. А значит и машины, которые ее исполняют, имеют большое количество разновидностей. Они могут ездить с помощью колес, катиться на гусеницах, шагать как животные или люди, либо даже ползать как змеи (Рис. 1.5.2)
У каждого из перечисленных видов конструкций есть свои достоинства и недостатки. Поэтому разработчиками используются все виды в зависимости от того, какую задачу выполняет робот. Для одной работы может лучше подходить колесная машина, для другой - гусеничная, а где-то наиболее эффективна шагающая.
 |
|||
| А | Б | В | Г |
| Рис. 1.5.2 Разновидности наземных роботов. А — колесные, Б — гусеничные, В — ползающие, Г —шагающие. | |||
1.2. Воздушные. К данной категории относятся все летающие роботы. Летать они могут по-разному: как самолет (рис. 1.5.3 А) или как вертолет (рис. 1.5.3 Б). Роботы вертолетного типа называют коптерами (copter в переводе с англ. - вертолет). Они имеют 4 или более винта, могут взлетать и садиться вертикально. Эта способность делает их применение очень удобным, поскольку не требуется большая площадка для взлета или посадки. Поэтому они наиболее популярны.
 |
 |
| А | Б |
| Рис. 1.5.3. Воздушные роботы. А — самолетного типа, Б-вертолетного. | |
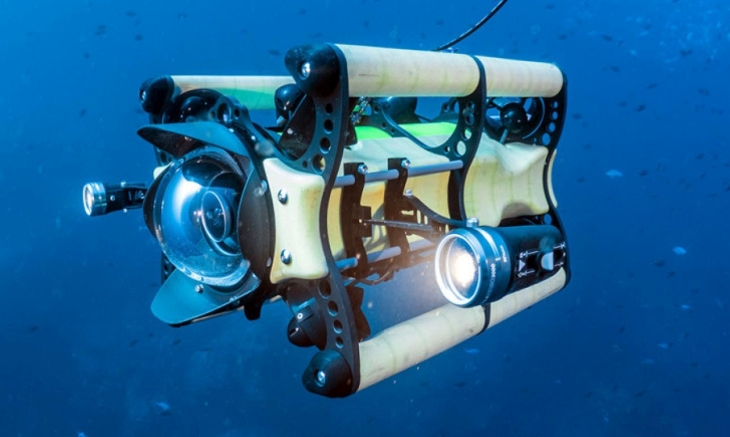
1.3. Водные. Очевидно, что имеются в виду роботы, которые предназначены для плавания по воде или под водой. Первые представляют корабли или лодки с автоматическим управлением (рис. 1.5.4 А), а вторые относятся к классу подводных лодок или батискафов (рис. 1.5.4 Б). Данные машины являются очень специализированными и достаточно редкими по сравнению с наземными и даже с воздушными роботами, т. к. решают узкий круг задач.
 |
 |
| А | Б |
| Рис. 1.5.4 Примеры роботов, работающих в водной стихии. А — надводный патрульный беспилотный катер, Б — подводный дистанционно управляемый аппарат. | |
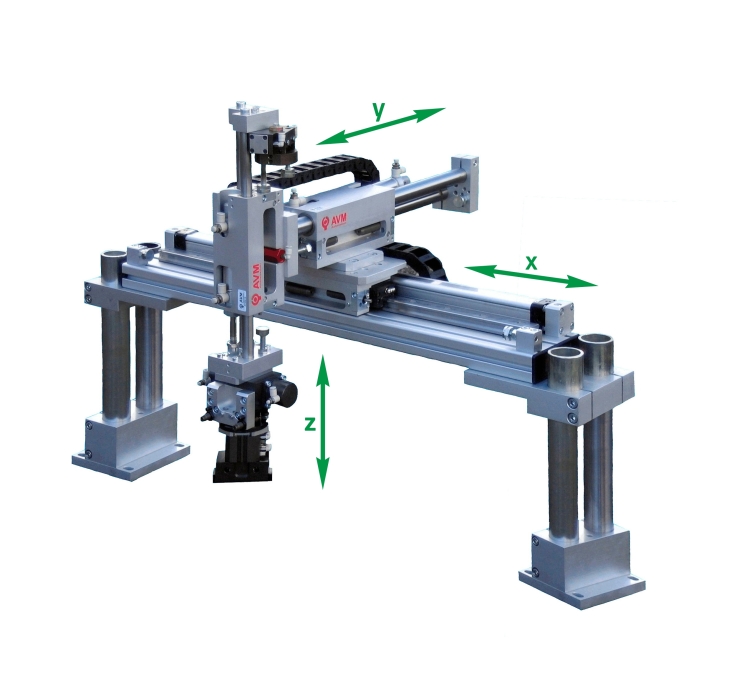
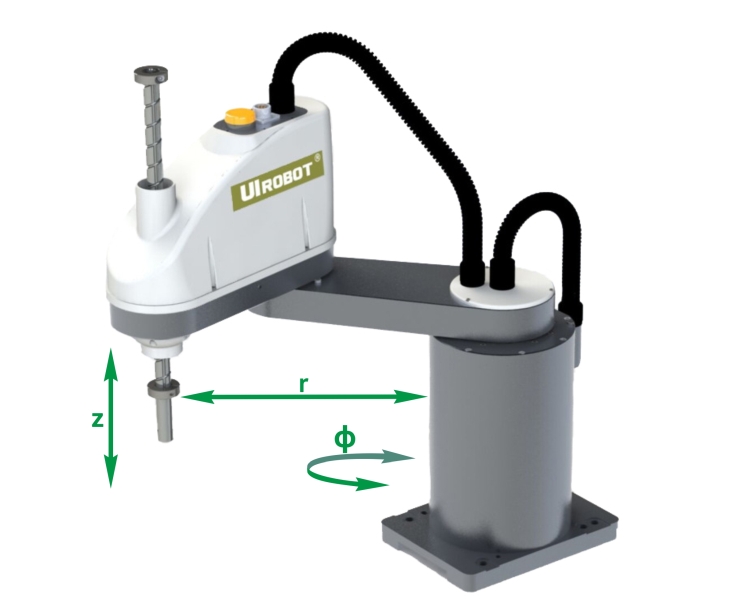
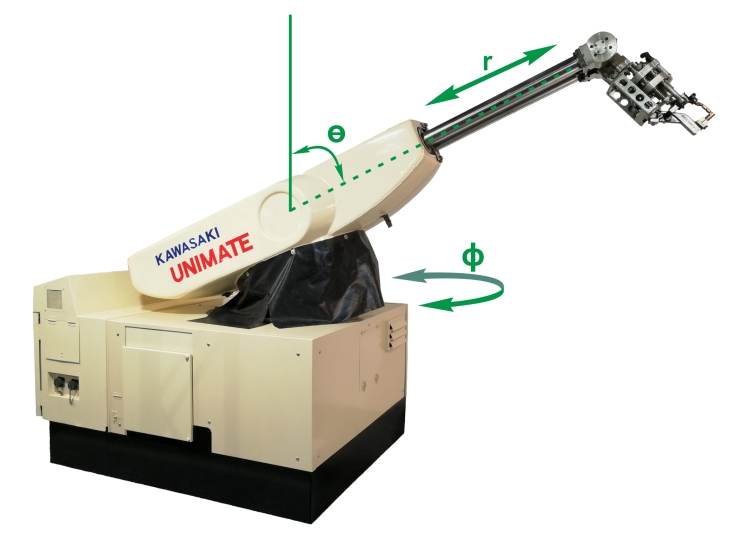
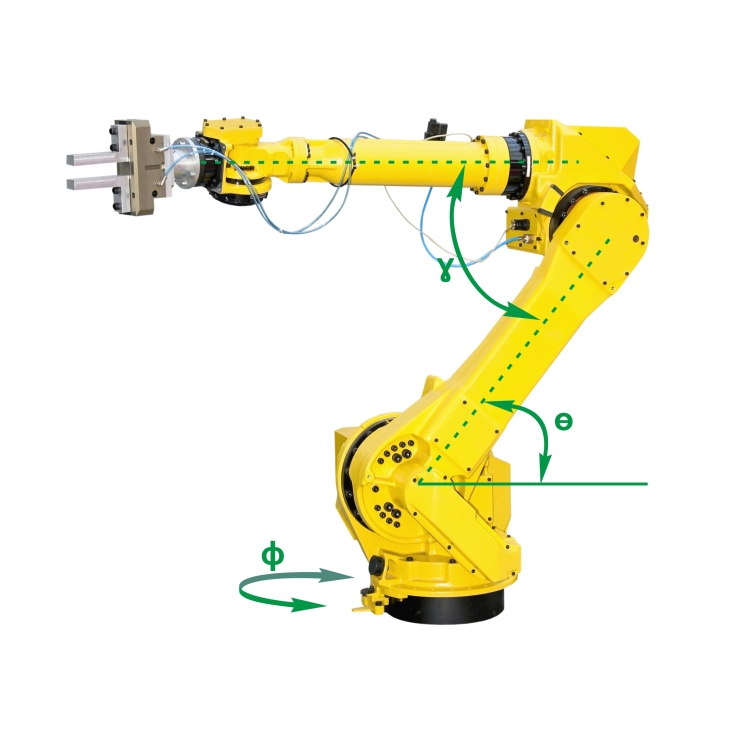
2. Манипуляционные. Можно сказать, что это старейший тип конструкций в робототехнике. По сути, робототехника начиналась именно с манипуляторов. Они впервые стали использоваться в промышленности еще в 60-х годах прошлого века. И они существенно отличаются по принципу действия и конструкции от мобильных роботов. Манипуляционные роботы предназначены для изменения пространственного положения каких-либо предметов, которыми могут быть инструменты, детали или узлы других машин. Они стационарны, то есть установлены на одном месте. Манипуляции с предметами выполняют относительно места своего закрепления. Манипуляционные роботы появились и получили широкое распространение именно на промышленных производствах, поскольку там проще всего создать условия для безопасной и эффективной работы такого робота. В результате за ними закрепилось название «промышленный робот». На рис. 1.5.5 показаны основные виды манипуляционных роботов, которые определяются системами координат, которые используются для управления положением манипулятора.
 |
 |
| А | Б |
 |
 |
| В | Г |
| Рис. 1.5.5 Примеры конструкций роботов-манипуляторов, работающих в разных системах координат. А — в прямоугольной системе координат, Б — в цилиндрической, В — в сферической, Г — в угловой. | |
3. Мобильно-манипуляционные. Эти роботы являются комбинацией манипуляционных и мобильных машин. Проще говоря, это мобильные роботы, на которые установлен один или несколько манипуляторов, способных производить захват предметов и изменять их положение в пространстве. Классическим вариантом такого робота является колесная или гусеничная тележка со смонтированным на ней угловым манипулятором. Его пример уже приводился на рис. 1.4.4. Равно как и показывался пример андроидного робота (рис. 1.1.4, 1.4.7). Человекоподобные машины отличаются тем, что у них всегда есть два манипулятора, конструкция которых очень похожа на строение руки человека.
Итак, рассмотрены классы и виды роботов по типам системы управления и механических частей. По сути, коротко охвачены почти все разновидности робототехнических машин, которые могут использоваться для большинства видов работ в быту и в разных отраслях промышленности.
Если обобщить приведенные на страницах книги иллюстрации, то очевидно, что промышленно и серийно производимые настоящие роботы технологически очень сложны в изготовлении. Создавать их самостоятельно в домашних условиях или в рамках школьных занятий именно в показанном на фотографиях виде невозможно. Это удел состоявшихся инженеров, работающих на серьезных промышленных предприятиях и в больших компаниях.
Однако, цель данного учебного курса заключается в формировании у школьников начальных инженерных навыков по разработке робототехнических конструкций. Для этого вовсе нет нужды в конструировании промышленных образцов. Достаточно научиться создавать модели роботов, которые работают по таким же принципам, что и настоящие промышленные роботы. Как с точки зрения механики, так и в плане системы управления. Тем самым без труда можно освоить методики разработки и создания различных типов роботов, в том числе таких же, как в промышленности. Очень скоро в этом можно будет убедиться.
Написать отзыв
Ваше Имя:Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке: